HKCLR-S系列柔性夾爪

簡介
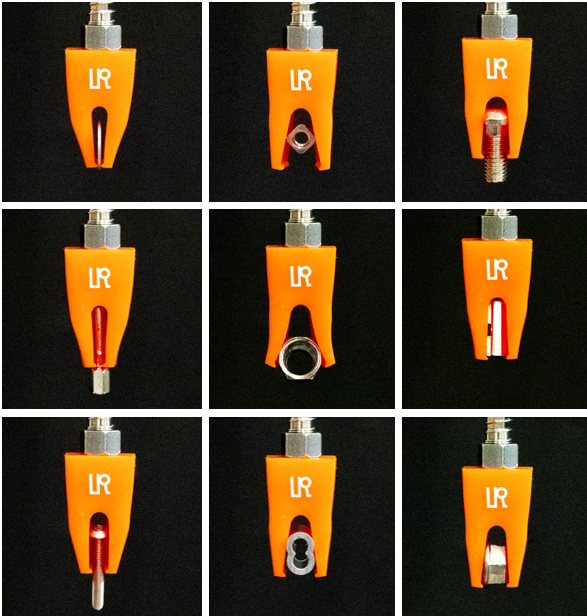
香港物流機械人研究中心獨創HKCLR-S系列柔性夾爪,通過氣壓伺服實現柔性魯棒抓取,可取代人工,在各種生活、物流、工業場景中完成各種抓取操作。
創新技術名稱
HKCLR-S 系列柔性夾爪
完成研究日期
2022
商品化機會
單獨售賣,系統集成售賣,以及代理商售賣
解決方案
為提升機械人抓取操作能力,香港物流機械人研究中心研發了此款HKCLR-S系列柔性夾爪,實現了近似人手的抓取能力,提升了機械人在生活、物流、及工業場景中的抓取操作表現。
創新技術
- 此柔性夾爪具有出色的適應性與柔性,在實現魯棒抓取與安全抓取的同時,減小了對傳感器的依賴,降低了計算成本和系統成本。
- 采用創新的加工工藝和模塊化設計,可根據物體的形態作適應性調整,放大或縮小機械手,以提高抓取的魯棒性。
主要成效
- 賦能機械人,使之擁有近似人手的抓取操作能力。
- 安裝、使用方便快捷,可有效提升機械人的抓取操作效率。
- 提升了機械人的抓取操作能力及其在物流、工業,以及生活場景中的應用。
應用範疇
- HKCLR 智能分揀系統
專利申請
- 已申請中國實用新型專利
香港中文大學與美國加州大學柏克萊分校及多間物流業機構合作,攜手成立香港物流機械人研究中心,旨在研發專為物流業者重塑「未來工作空間」的先進科技。中心將進行四項與物流業相關的機械人技術研究計劃,分別為:
• 魯棒傳感與感知
• 人機協作
• 智能操作機器人
• 無人機駕駛系統
研究成果以應用於多個物流業領域為目標,當中包括機場自動化、倉庫自動化、貨櫃碼頭自動化、自動運送及自駕物流貨車。中心旨在促進人工智能及機械人技術之轉化研究,有助打造香港在物流用機械人技術領域上成為領先者 ,並鼓勵科技初創企業開發機械人知識產權及切實可行的商用方案。此外,中心亦會積極為大學畢業生、博士後研究員及工程師提供訓練,培育人才。
查詢