通用抓取框架

简介
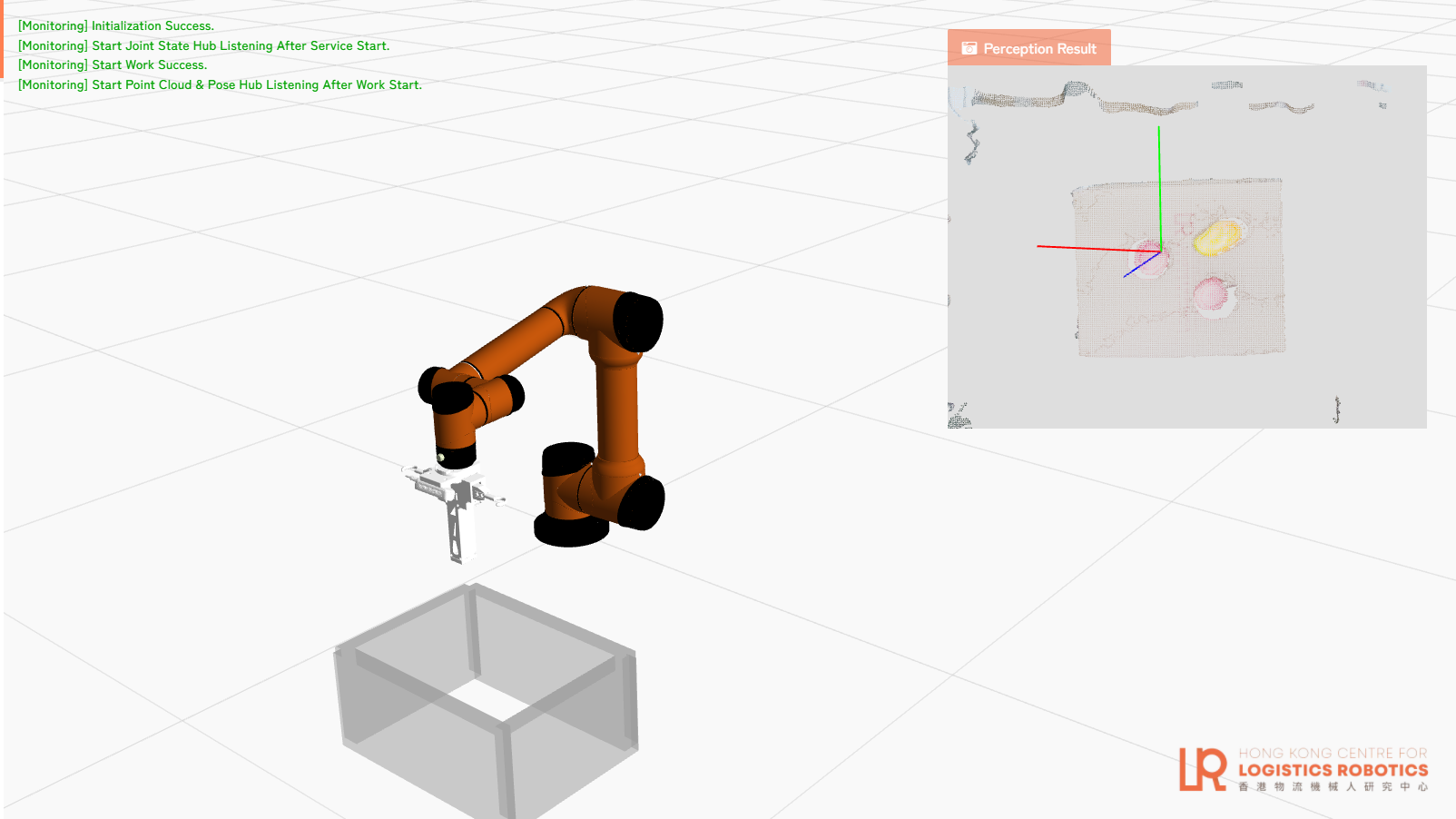
通用抓取框架是一种先进的软件,能够让机器人在非结构化环境中识别、分析和抓取各种物体。通过利用最前沿的人工智能、计算机视觉和运动规划技术,提升机器人的操作能力,确保其在物流、制造和服务机器人等真实场景中的精确性和适应性。


商品化机会
技术授权协议
解决方案
通用抓取框架解决了机器人在非结构化环境中抓取的挑战。它使机器人能够精确地识别、分析和抓取各种形状、纹理、方向,甚至可变形的物体,从而克服适应性和精确性方面的限制,满足多种业界应用的需求。
创新技术
- 利用先进的人工智能和机器学习技术,实现实时决策,从而高效且精确地进行抓取。
- 在与各种机器人系统和传感器集成,提升跨行业的灵活性。
- 能够抓取具有多种形状、纹理、尺寸,甚至可变形材料的物体。
主要成效
- 提升机器人在抓取任务中的性能,减少业界应用中的时间消耗和错误率。
- 使机器人能够在非结构化环境中处理各种物体,包括可变形物品。
- 支持集成到物流、制造和服务等多种行业中。
应用范畴
- 工业上下料
- 商品分拣
香港中文大学与美国加州大学柏克莱分校及多间物流业机构合作,携手成立香港物流机械人研究中心,旨在研发专为物流业者重塑「未来工作空间」的先进科技。中心将进行四项与物流业相关的机械人技术研究计划,分别为:
• 机器人感知/p>
• 人工智能驱动机器人操作
• 人机协作
• 无人驾驶物流系统
研究成果以应用于多个物流业领域为目标,当中包括机场自动化、仓库自动化、货柜码头自动化、自动运送及自驾物流货车。中心旨在促进人工智能及机械人技术之转化研究,有助打造香港在物流用机械人技术领域上成为领先者 ,并鼓励科技初创企业开发机械人知识产权及切实可行的商用方案。此外,中心亦会积极为大学毕业生、博士后研究员及工程师提供训练,培育人才。
查询