Grasping Anything Framework

Overview
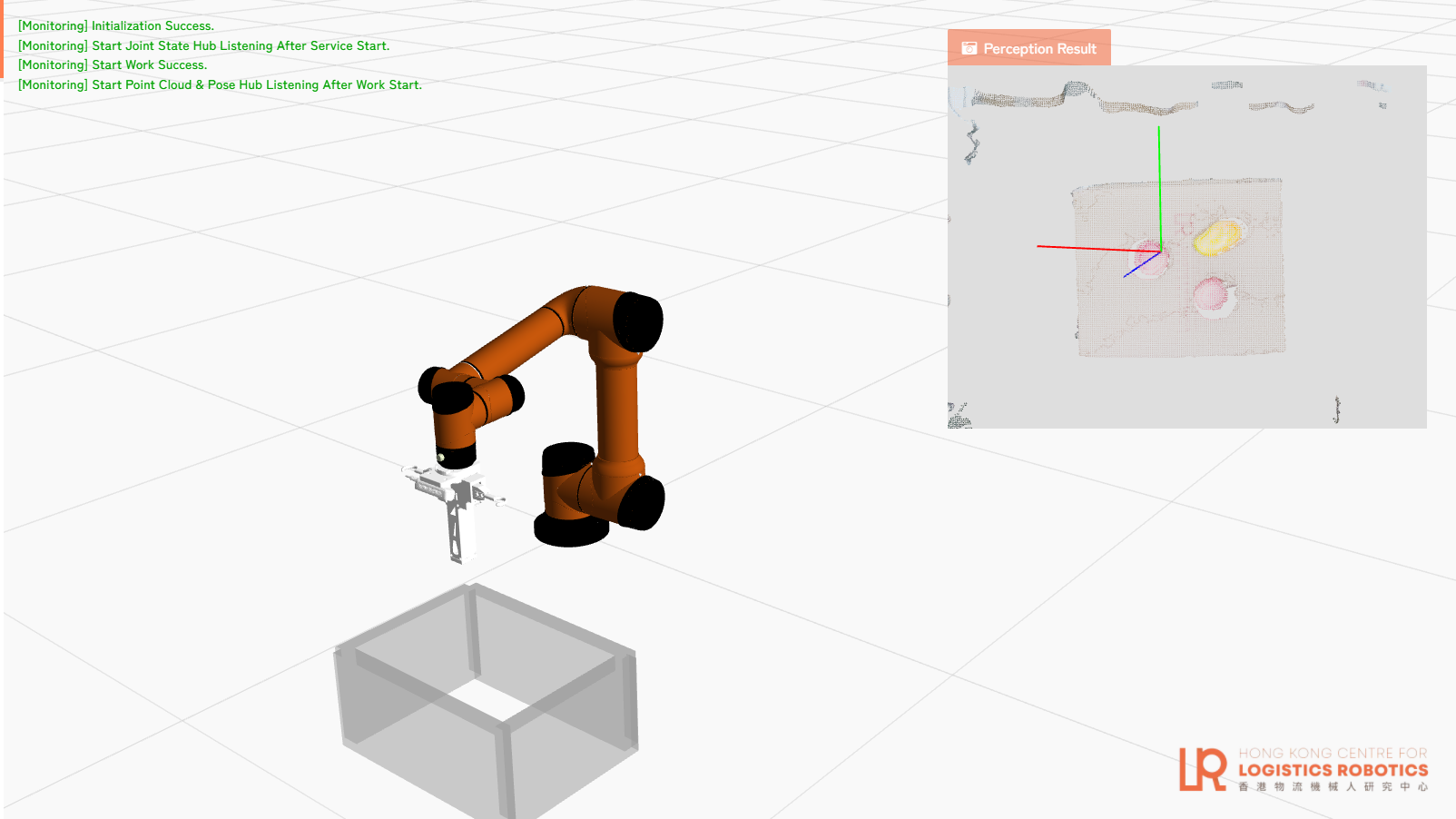
The Grasping Anything Framework is advanced software enabling robots to identify, analyze, and grasp diverse objects in unstructured environments. Leveraging cutting-edge AI, computer vision, and motion planning, GAF enhances robotic manipulation capabilities, ensuring precision and adaptability for real-world applications in logistics, manufacturing, and service robotics.


Commercialisation opportunities
technology licensing agreement
Problem addressed
The Grasping Anything Framework addresses the challenge of robotic grasping in unstructured environments. It enables robots to accurately identify, analyze, and grasp objects of varying shapes, textures, orientations, and even deformable objects, overcoming limitations in adaptability and precision for diverse industrial applications.
Innovation
- Leverages advanced AI and machine learning to enable real-time decision-making for efficient and precise grasping.
- Designed to integrate with various robotic systems and sensors, enhancing flexibility across industries
- Capable of grasping objects with diverse shapes, textures, sizes, and even deformable materials
Key impact
- Enhances robotic performance in grasping tasks, reducing time and errors in industrial applications
- Enables robots to handle a wide range of objects, including deformable items, in unstructured environments
- Supports integration into diverse industries such as logistics, manufacturing, and service
Application
- Industrial Replenishment
- Goods Picking and Sorting
Hong Kong Centre for Logistics Robotics was established in 2020 by The Chinese University of Hong Kong, with research contributions from the University of California, Berkeley. The Centre focuses on the research and development (R&D) of robotics and artificial intelligence (AI) technologies for “future workplace” as well as innovative solutions to the “pressing problems” in the logistics industry. In particular, HKCLR aims to advance robot intelligence in terms of
• Robust Sensing and Perception
• AI-Powered Robot Manipulation
• Human-Robot Collaboration
• Unmanned Logistics Vehicles
The research team is composed of distinguished professors from the two universities and accomplished Ph.D. degree holders across world-leading universities. The Centre is dedicated to pursuing innovative breakthroughs in ready-for-use robotics and AI technologies via close collaboration with academic and industrial stakeholders throughout Hong Kong, the Greater Bay Area (GBA), and Chinese Mainland. It is expected that the Centre will foster the leading role of the local logistics industry in GBA and Chinese Mainland, meanwhile enhancing its competitive edge in the global arena.
Enquiry