通用抓取框架

簡介
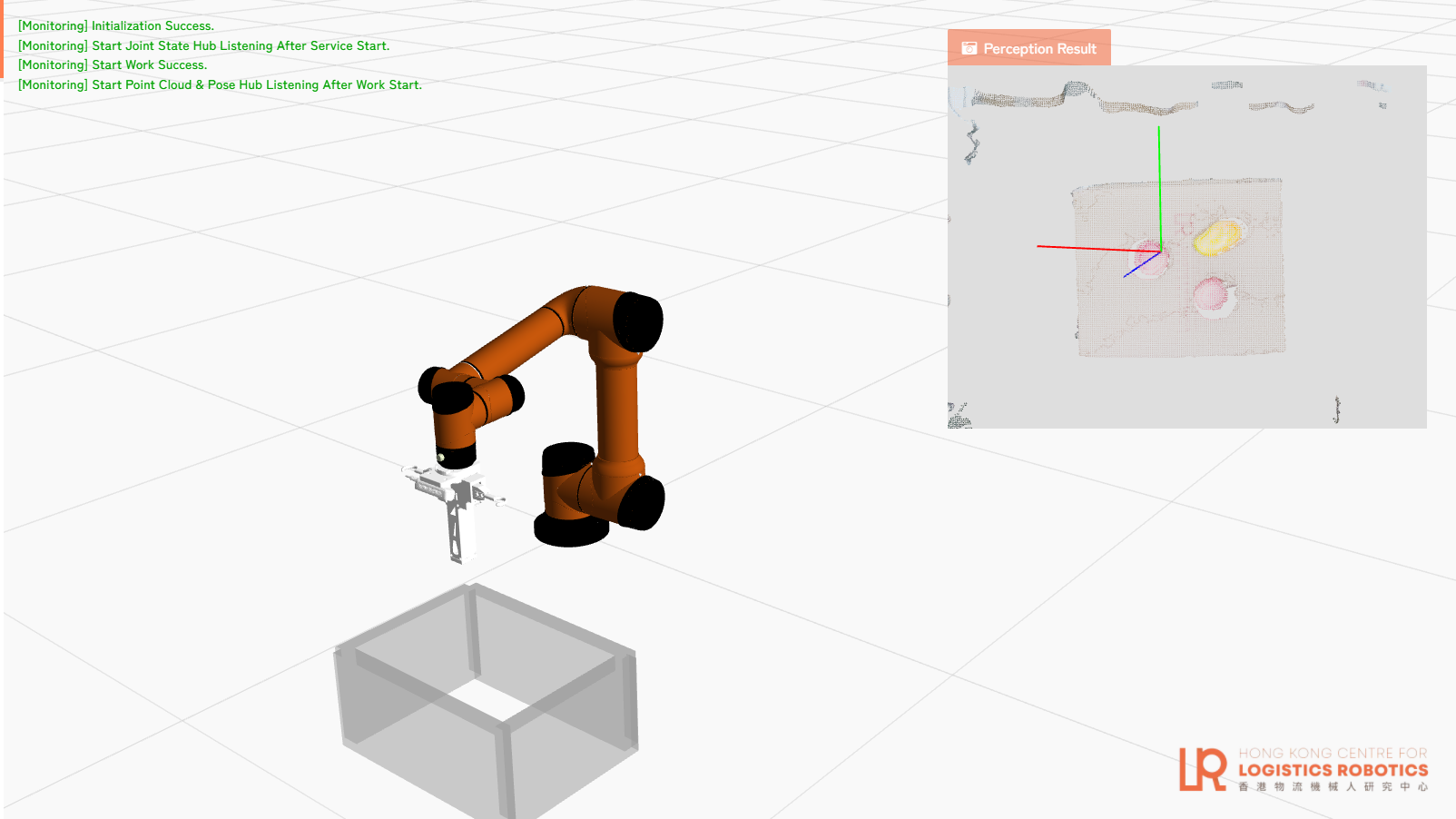
通用抓取框架是一種先進的軟件,能夠讓機器人在非結構化環境中識別、分析和抓取各種物體。通過利用最前沿的人工智能、計算機視覺和運動規劃技術,提升機器人的操作能力,確保其在物流、製造和服務機器人等真實場景中的精確性和適應性。


商品化機會
技術授權協議
解決方案
通用抓取框架解決了機器人在非結構化環境中抓取的挑戰。它使機器人能夠精確地識別、分析和抓取各種形狀、紋理、方向,甚至可變形的物體,從而克服適應性和精確性方面的限制,滿足多種業界應用的需求。
創新技術
- 利用先進的人工智能和機器學習技術,實現實時決策,從而高效且精確地進行抓取。
- 在與各種機器人系統和傳感器集成,提升跨行業的靈活性。
- 能夠抓取具有多種形狀、紋理、尺寸,甚至可變形材料的物體。
主要成效
- 提升機器人在抓取任務中的性能,減少業界應用中的時間消耗和錯誤率。
- 使機器人能夠在非結構化環境中處理各種物體,包括可變形物品。
- 支持集成到物流、製造和服務等多種行業中。
應用範疇
- 工業上下料
- 商品分揀
香港中文大學與美國加州大學柏克萊分校及多間物流業機構合作,攜手成立香港物流機械人研究中心,旨在研發專為物流業者重塑「未來工作空間」的先進科技。中心將進行四項與物流業相關的機械人技術研究計劃,分別為:
• 機械人感知
• 人工智能驅動機械人操作
• 人機協作
• 無人駕駛物流系統
研究成果以應用於多個物流業領域為目標,當中包括機場自動化、倉庫自動化、貨櫃碼頭自動化、自動運送及自駕物流貨車。中心旨在促進人工智能及機械人技術之轉化研究,有助打造香港在物流用機械人技術領域上成為領先者 ,並鼓勵科技初創企業開發機械人知識產權及切實可行的商用方案。此外,中心亦會積極為大學畢業生、博士後研究員及工程師提供訓練,培育人才。
查詢