Human-Robot Direct Tactile Interaction System (Electronic Power Assist Trolley System)
Overview
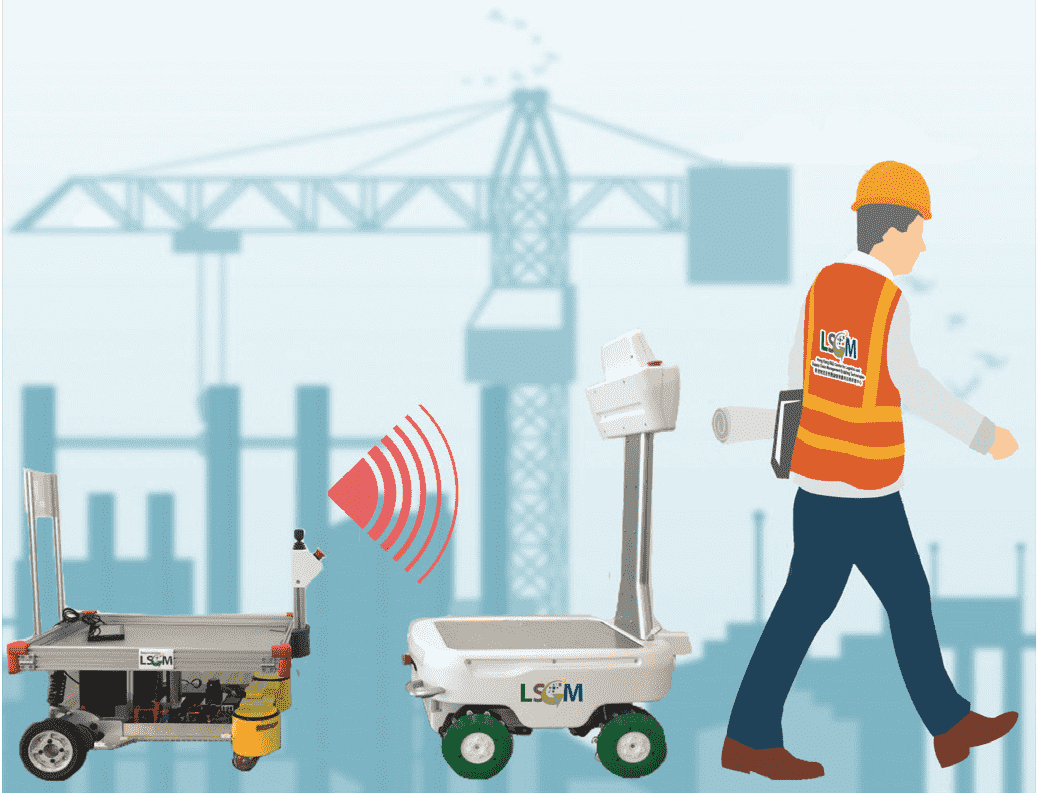
Adopting power assist technology, LSCM’s Human-Robot Direct Tactile Interaction System (HARDTIS) can measure the micro deformation of the handlebars of cart or trolley when it is in use, so that amplified input force and direction signals will be generated to make a heavily loaded cart becomes very lightweight and easy to use.

Research completion
2024
Commercialisation opportunities
Technology licensing
Problem addressed
The traditional motor-powered carts require users to receive training in advance in order to get used to the controller. A button for changing direction is also needed to change the moving direction. Besides, users may get hurt if they are not paying enough attention when operating it.
Innovation
- Sensors are strategically embedded in the trolley handlebar to measure the micro deformation of the materials when force is applied by the user.
- The torque vector is calculated in 100 times per second based on the sensor's value by an onboard AI controller. Amplified torque is generated by two motors connected to the wheels of the trolley. By calculating torque vector, the manoeuvre of this power assist trolley can be controlled without buttons.
- The built-in power regeneration and brake system make it safe to be used even on the ramp.
Key impact
- The human-robot direct tactile interaction system can greatly reduce human effort in moving heavy items.
- It can help the workers to reduce the chances getting musculoskeletal disorders and occupational injuries.
- The automatic brake system makes moving on the ramp more reliable and safe.
- Speed is much faster than traditional approach though less effort is needed.
Award
- Gold Medal in the 48th International Exhibition of Inventions of Geneva
Application
- Logistics and warehousing
- Hotels
- Hospitals
Patent
- US 17/885,900
- CN 2022 1097 1259.5
- HK 3202 2057 424.0
Logistics and Supply Chain MultiTech R&D Centre (LSCM)
Logistics and Supply Chain MultiTech R&D Centre (LSCM) was founded in 2006, with funding from the Innovation and Technology Fund of The Government of the Hong Kong SAR, and is co-hosted by the University of Hong Kong, the Chinese University of Hong Kong and the Hong Kong University of Science and Technology. It aims to strengthen the local logistics sector and related industries by providing a one-stop resource for applied research and technology transfer, and to reinforce cooperation between the industry and research institutes to bring about meaningful and significant impact on the industry and the community.
LSCM serves the industry by initiating research projects, contract research, as well as providing business matching opportunities, technology transfer and intellectual property commercialisation. LSCM initiates technology and knowledge transfer to the marketplace to promote industrial digitalisation, facilitate technology advancement and strengthen Hong Kong’s position as a leading logistics and commercial hub.
Enquiry