High Speed Scooping Manipulation Method

Overview
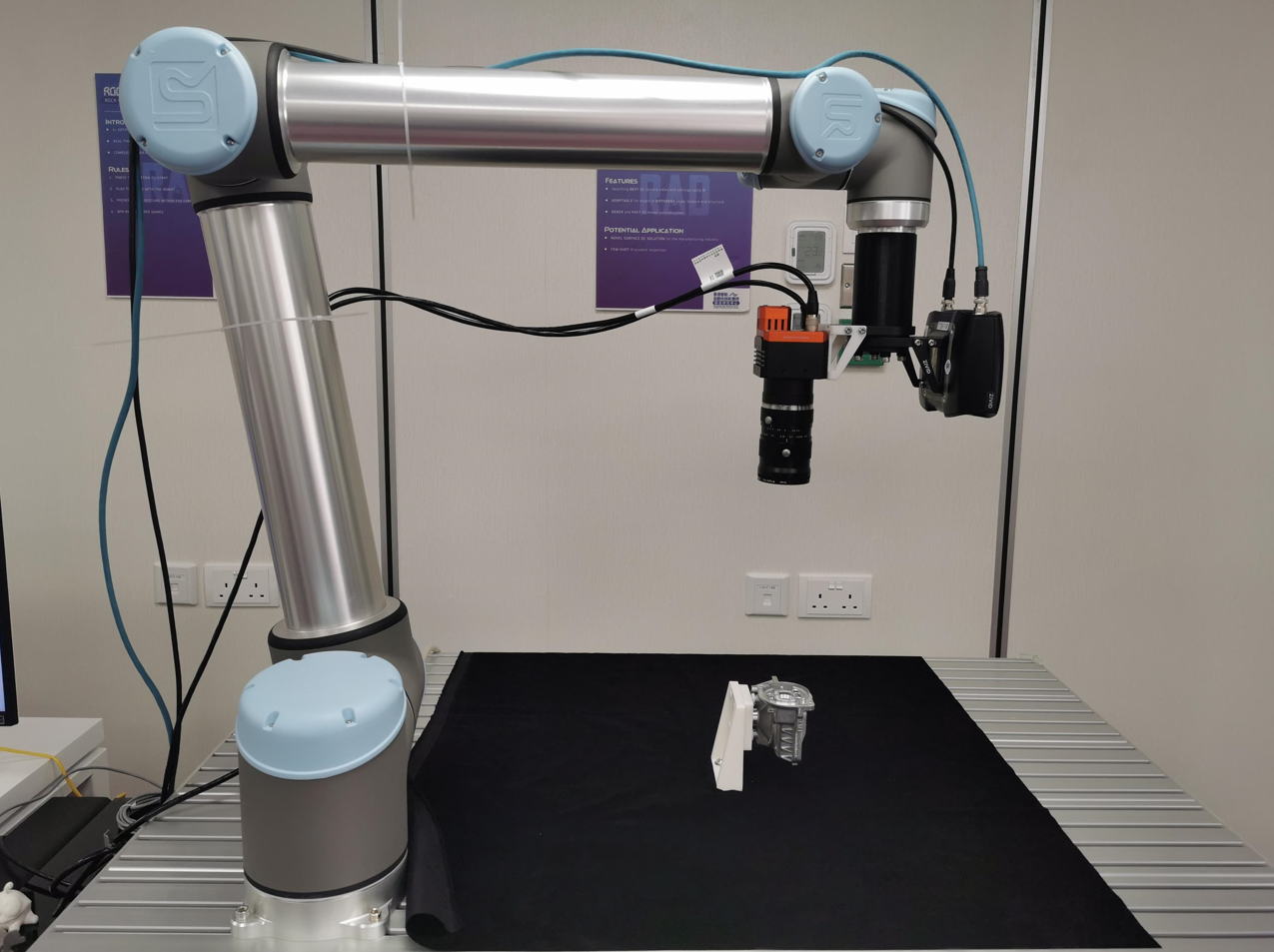
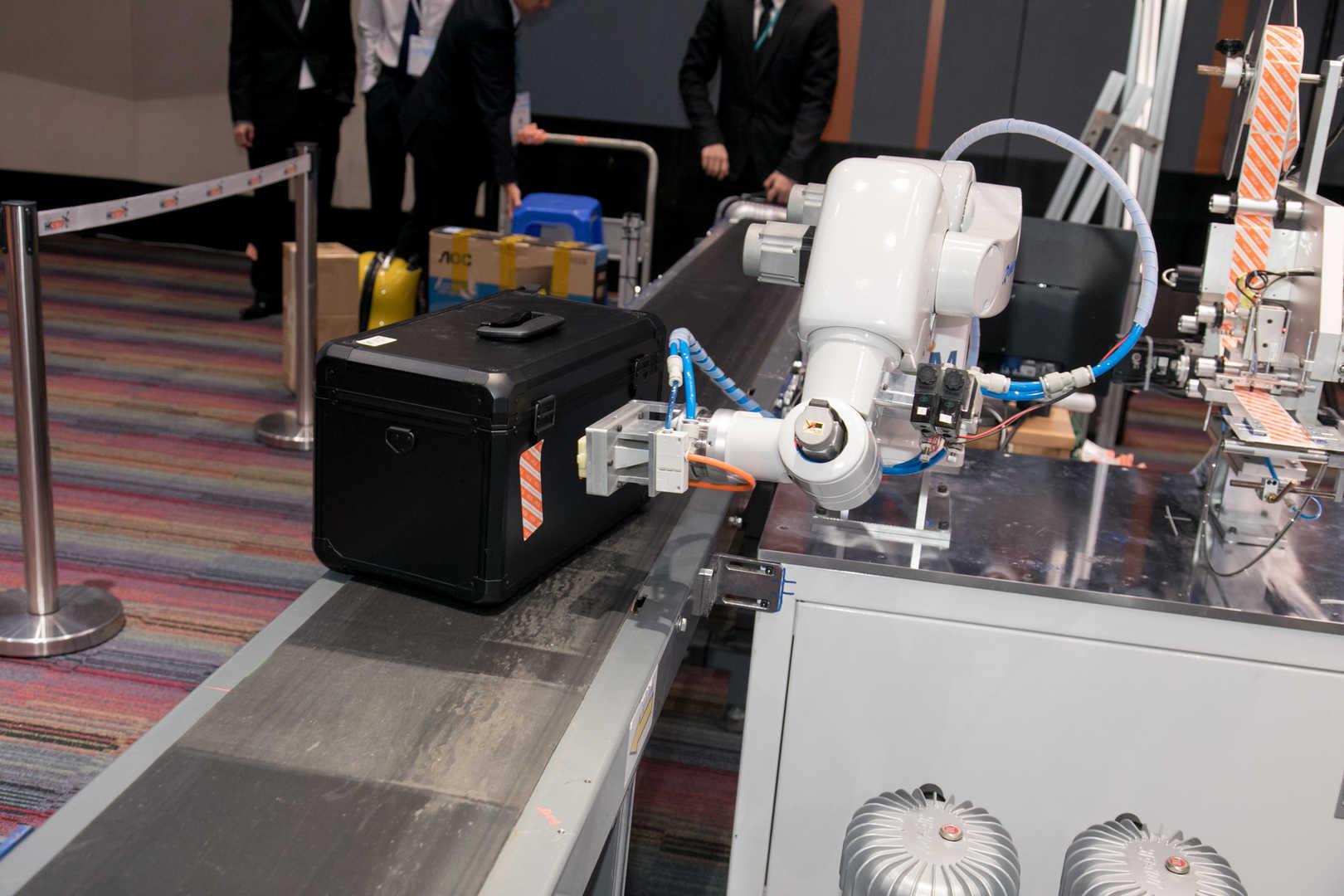
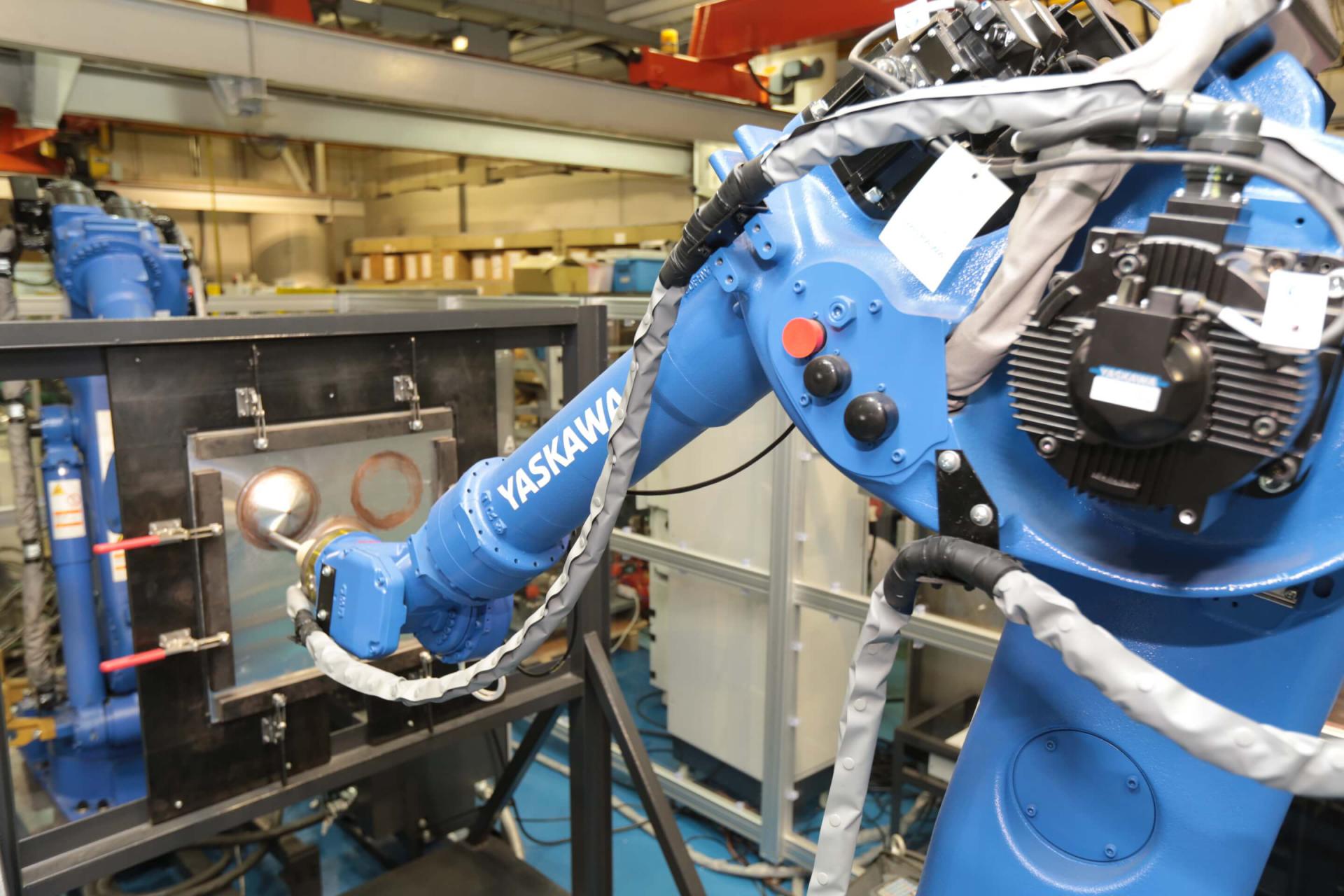
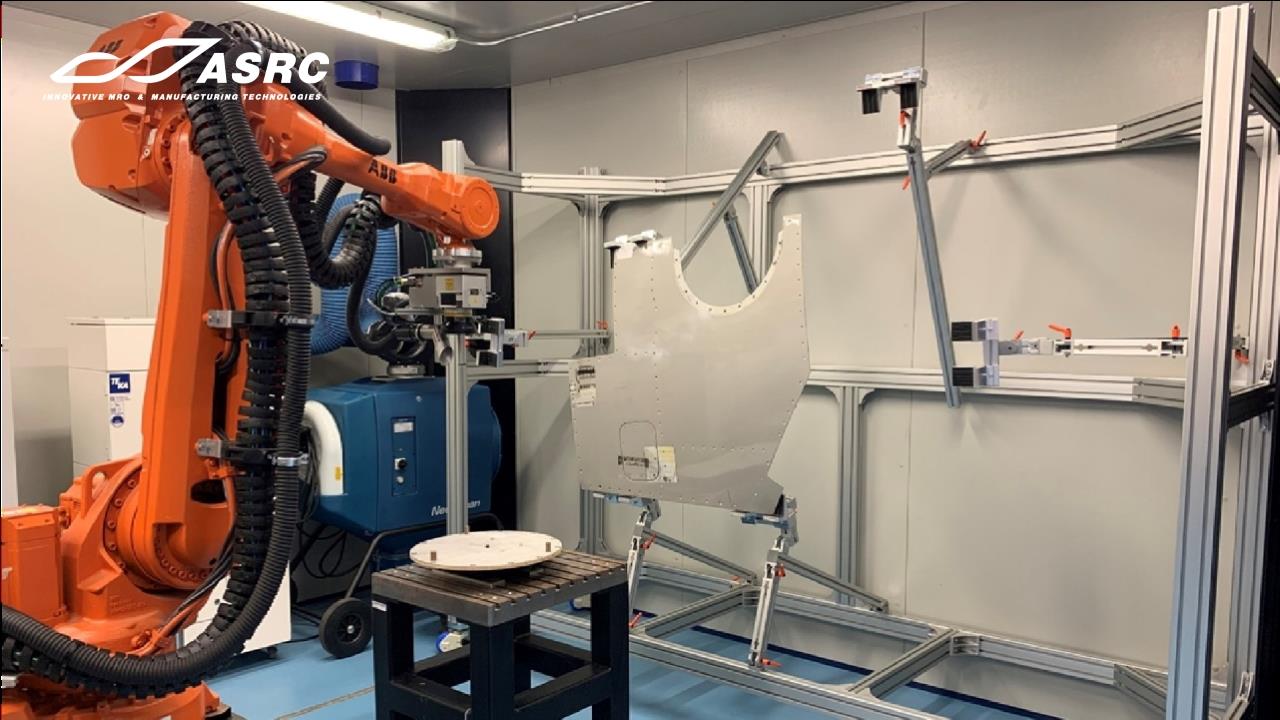
A robotic operation method for high-speed scooping. Through leveraging the versatility and flexibility of the robot’s direct-drive gripper (acts as sensors and actuators), it can perfectly secure and grab objects at any angle under high speed without causing damages on them. Therefore, providing users with a low-cost implementation and high adaptability to the environment
Commercialisation opportunities
Technology licensing agreement
Problem addressed
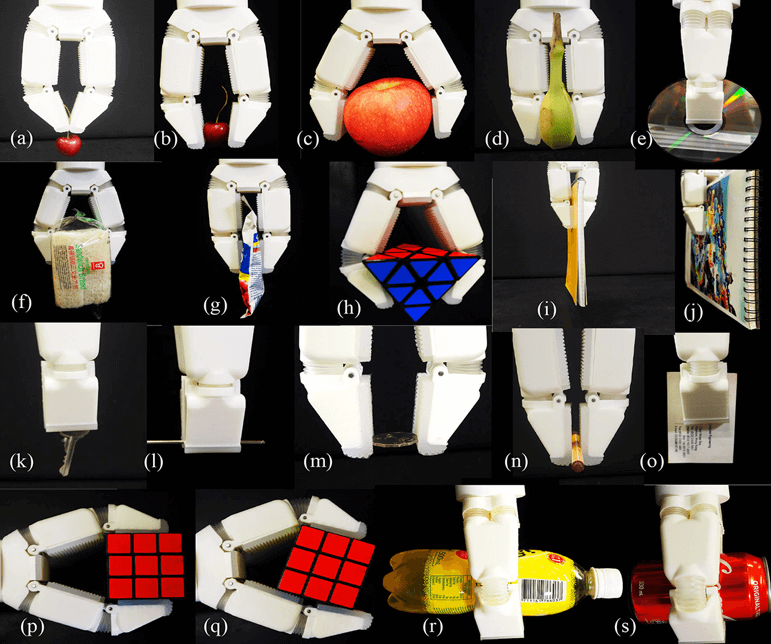
The method addresses the challenges of picking an object lying on a hard support surface, for example, picking a thin plastic card lying on a tabletop, using a multi-fingered robotic gripper that is not equipped with the conventional yet limited suction pad array
Innovation
- The robot executing the method is controlled to negotiate with the surface on which an object of interest is lying in an adaptive manner and to finally obtain a stable pinch grasp on the object at a high speed.
- The action of the robot is formulated as an impedance/stiffness feedback control task that can be realized by a gripper with direct-drive fingers, which can function as both actuators and sensors.
Key impact
- High speed picking with less cycle time
- Low-cost implementation and adaptability to the environment
- Able to use electromagnetic motors as both actuators and sensors
Patent
- US Patent Application, 63312101
The Hong Kong University of Science and Technology (HKUST)
The Hong Kong University of Science and Technology (HKUST) (https://hkust.edu.hk/) is a world-class research intensive university that focuses on science, technology and business as well as humanities and social science. HKUST offers an international campus, and a holistic and interdisciplinary pedagogy to nurture well-rounded graduates with global vision, a strong entrepreneurial spirit and innovative thinking. Over 80% of our research work were rated “Internationally excellent” or “world leading” in the Research Assessment Exercise 2020 of Hong Kong’s University Grants Committee. We were ranked 3rd in Times Higher Education’s Young University Rankings 2022, and our graduates were ranked 23rd worldwide and among the best from universities from Asia in Global University Employability Survey 2021.
Enquiry