车路协同高精地图
简介
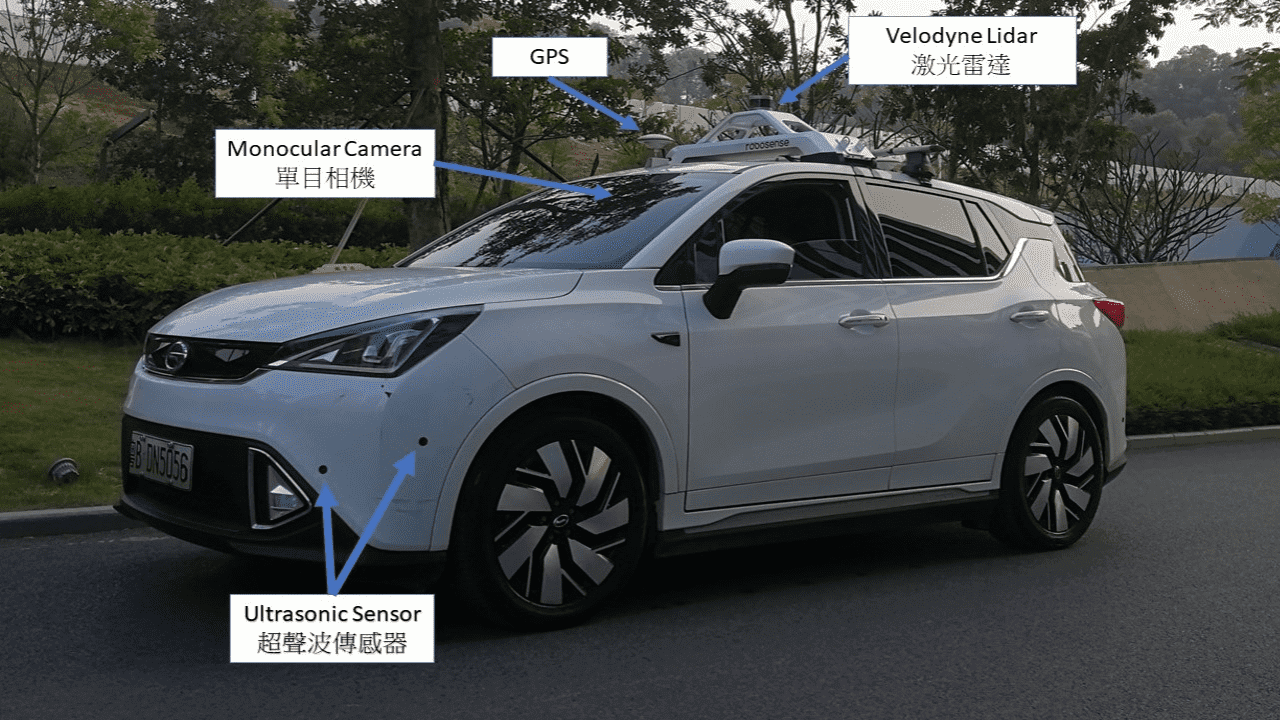
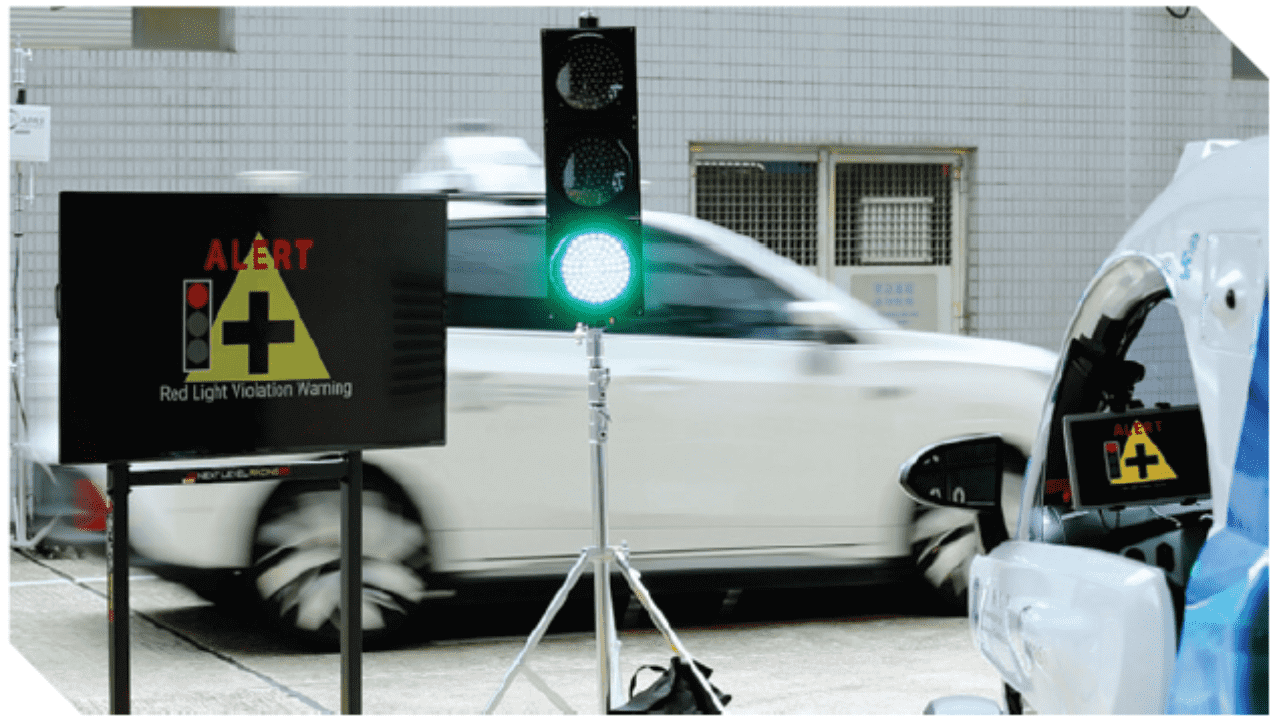
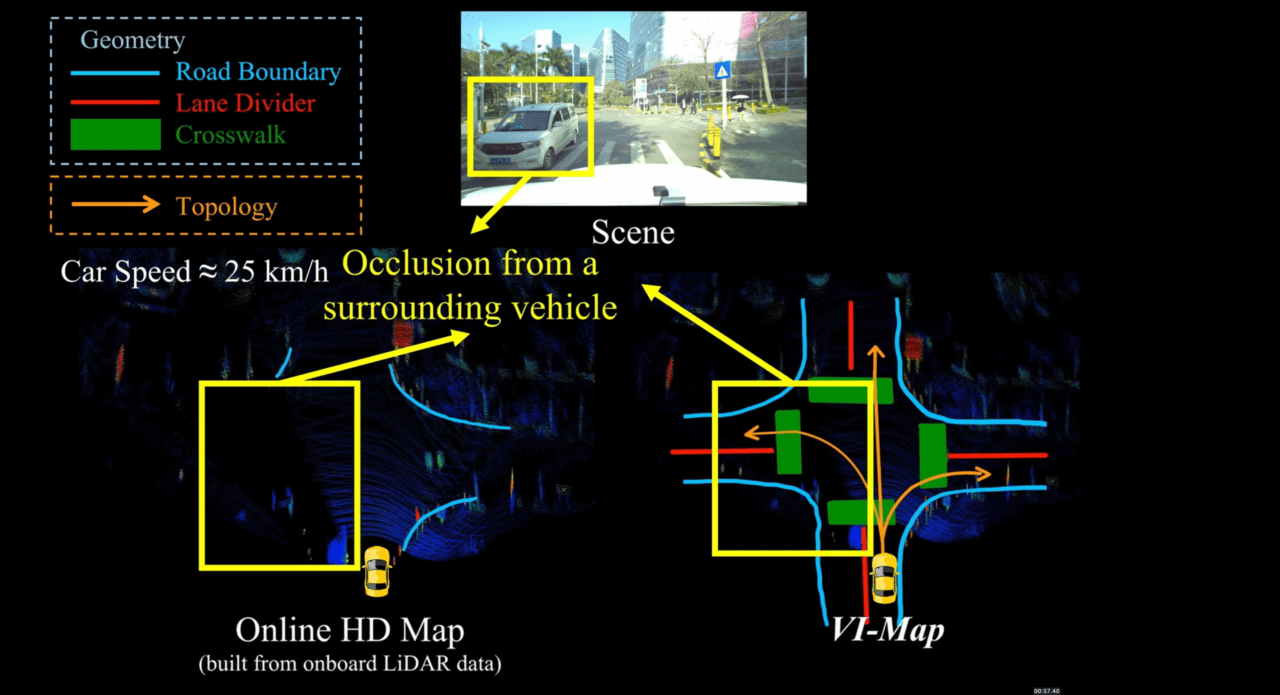
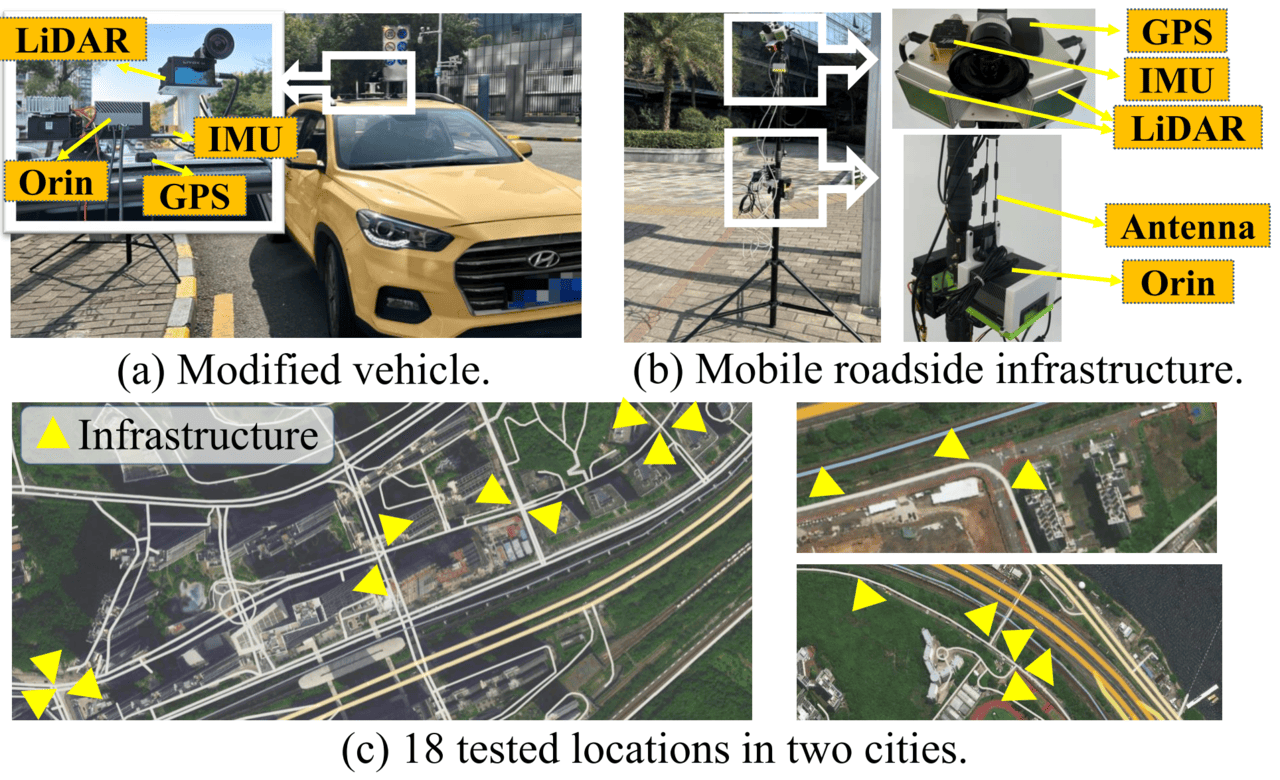
中大AIoT实验室首创了一种高清地图构建方法VI-Map,通过融合路侧基础设施的感知能力来增强和拓展自动驾驶车辆的视野。
创新技术名称
VIMap:车路协同自动驾驶高精地图
完成研究日期
2023
商品化机会
技术授权协议
解决方案
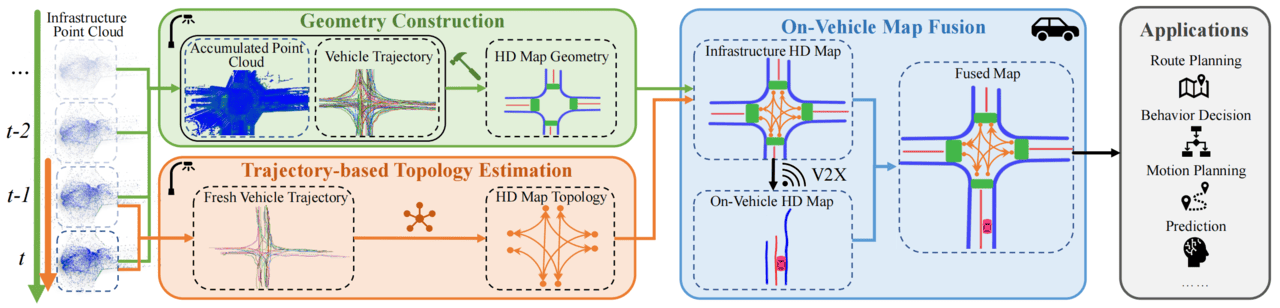
利用基础设施,VI-Map 无缝融合路侧传感器感知与车辆感知,实时自动构建高清地图,大幅降低制图成本,同时确保地图的及时更新和高精度。
创新技术
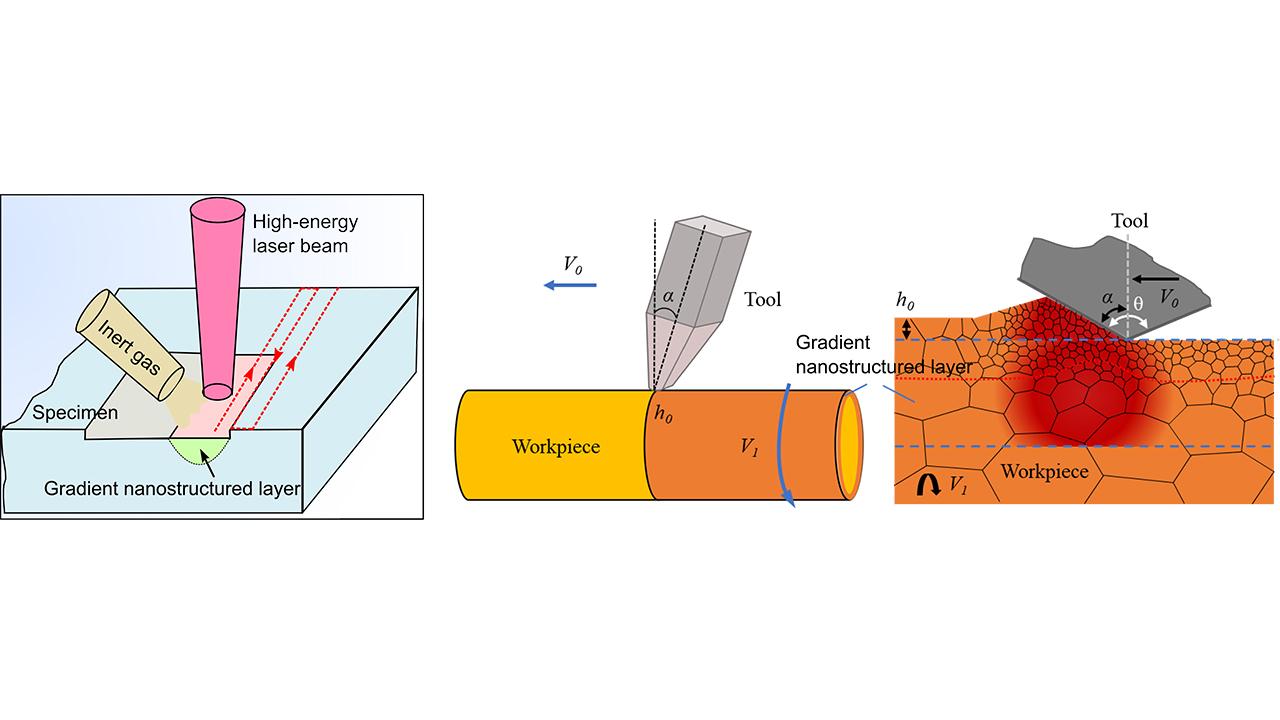
- 利用从激光雷达点云中提取的密度、方向、高度和强度特征,基础设施能够高效地构建局部高清地图。
- 利用车辆轨迹和车道实例分割,VI-Map 在地图中构建道路的驾驶拓扑结构。
- 提出一种三阶段建图算法,用于融合来自两个视角且差异较大的矢量化高清地图。
主要成效
- 此技术可以大幅提高自动驾驶建图的精度和范围,提升自动驾驶的效率和安全性。
- 此技术能够有效克服复杂环境干扰,如恶劣天气与遮挡区域,拓宽自动驾驶的可行范围,提升其在各类场景中的适应性与可靠性。
奖项
- MobiCom 2023年最佳社区贡献奖
- 第49届日内瓦国际发明展金奖
应用范畴
- 提升自动驾驶安全性
- 增强自动驾驶效率
香港中文大学
香港中文大学(中大)成立于1963年,是一所具有全球视野的前瞻性综合性研究型大学,其使命是融合传统与现代,融汇中西。中大师生来自世界各地。四位诺贝尔奖得主与大学有联系,是香港唯一一所拥有诺贝尔奖、图灵奖、菲尔兹奖和凡勃伦奖得主的大专院校。中大毕业生通过广泛的校友网络连接全球。中大在多个学科领域开展广泛的研究项目,并努力为所有学术人员提供开展咨询和与业界合作项目的空间。大学对最高研究标准的坚持为其赢得了令人羡慕的研究声誉。学校设有5个国家重点实验室,受中国科技部委托,开展具有国际水平的研究,承担国家重大科研任务。大学还拥有发表研究的出色记录,无论是在特定学科期刊,还是在更引人注目的出版物上,如《科学》、《自然》和《柳叶刀》。
查询