智能手眼协调机械臂定位系统
简介
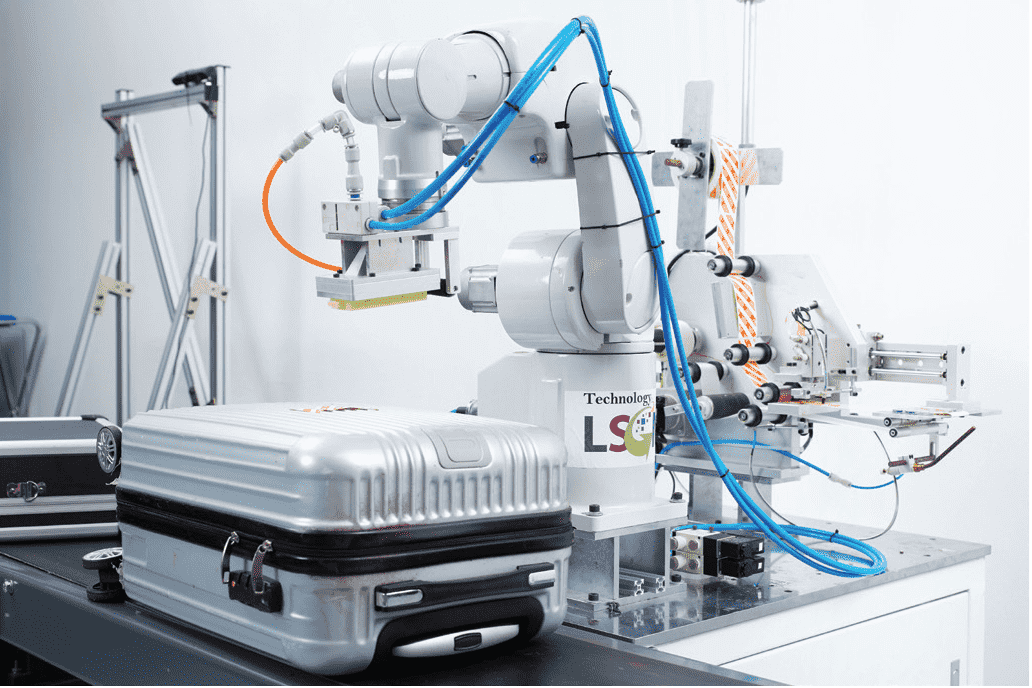
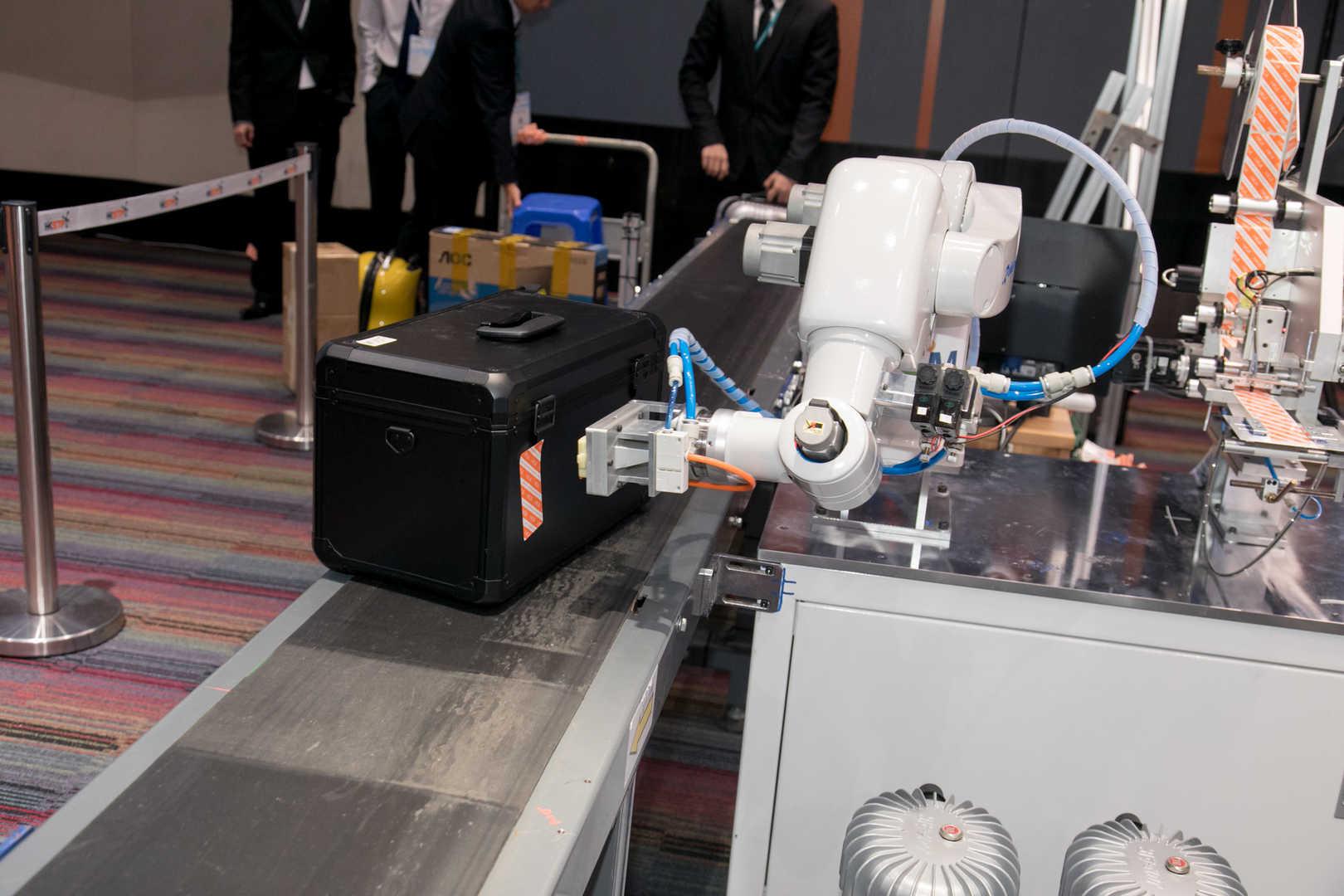
LSCM设计的多种影像协调控制系统,以及灵活的机械臂,可应用到商用机械臂上,处理输送带上不同形状、颜色、尺寸和表面纹理的对象。
完成研究日期
2018
解决方案
重複性工作容易令工人身体劳损,而且耗时。而服务机械人则可以代替人手进行重複性工作,例如张贴标签,不但能减少工人的劳损,亦能节省时间。
创新技术
- RGB−D视觉系统将行李的形状、尺寸和表面纹理的信息发送给气动末端执行器,进行标签黏贴。机械学习算法会把接收到的3D模型和RGB图像进行分析,从而实时划分对象的位置。
- 当末端执行器侦测到物件,并把它锁定为目标物件后,表面拟合算法便会应用到3D模型中,从而在行李上找出适合黏贴标签的位置。
- 气动末端执行器使用真空气泵,从盛载标签的容器中吸起标签,然后模仿手动黏贴标签的方法,使用空气喷射将标签贴在行李上。
主要成效
- 服务机械人可以代替人手,进行张贴标签的重复性工作,减少工人的劳损。
- 此技术已在香港国际机场(HKIA)试行,以便在真实的工业环境中应用。
应用范畴
- 张贴行李标签
物流及供应链多元技术研发中心
物流及供应链多元技术研发中心(LSCM)于 2006 年成立,获特区政府创新及科技基金拨款资助,并由香港大学、香港中文大学和香港科技大学恊办;旨在提供一站式应用研发及技术转移服务,巩固本地物流及相关行业的发展,并加强业界与研发机构在应用研究方面的合作,为业界和社会带来具意义和影响力的效益。
LSCM为业界提供技术研究项目、合约研究项目、业务配对、技术转移及知识产权商品化服务等,并透过技术转移将技术及相关知识推向市场,鼓励业界数码转型,协助业界提升效率,从而巩固香港作为首屈一指的物流与商贸枢纽之地位。
查询