智能手眼協調機械臂定位系統
簡介
LSCM設計的多種影像協調控制系統,以及靈活的機械臂,可應用到商用機械臂上,處理輸送帶上不同形狀、顏色、尺寸和表面紋理的物件。
完成研究日期
2018
商品化機會
技術授權許可
解決方案
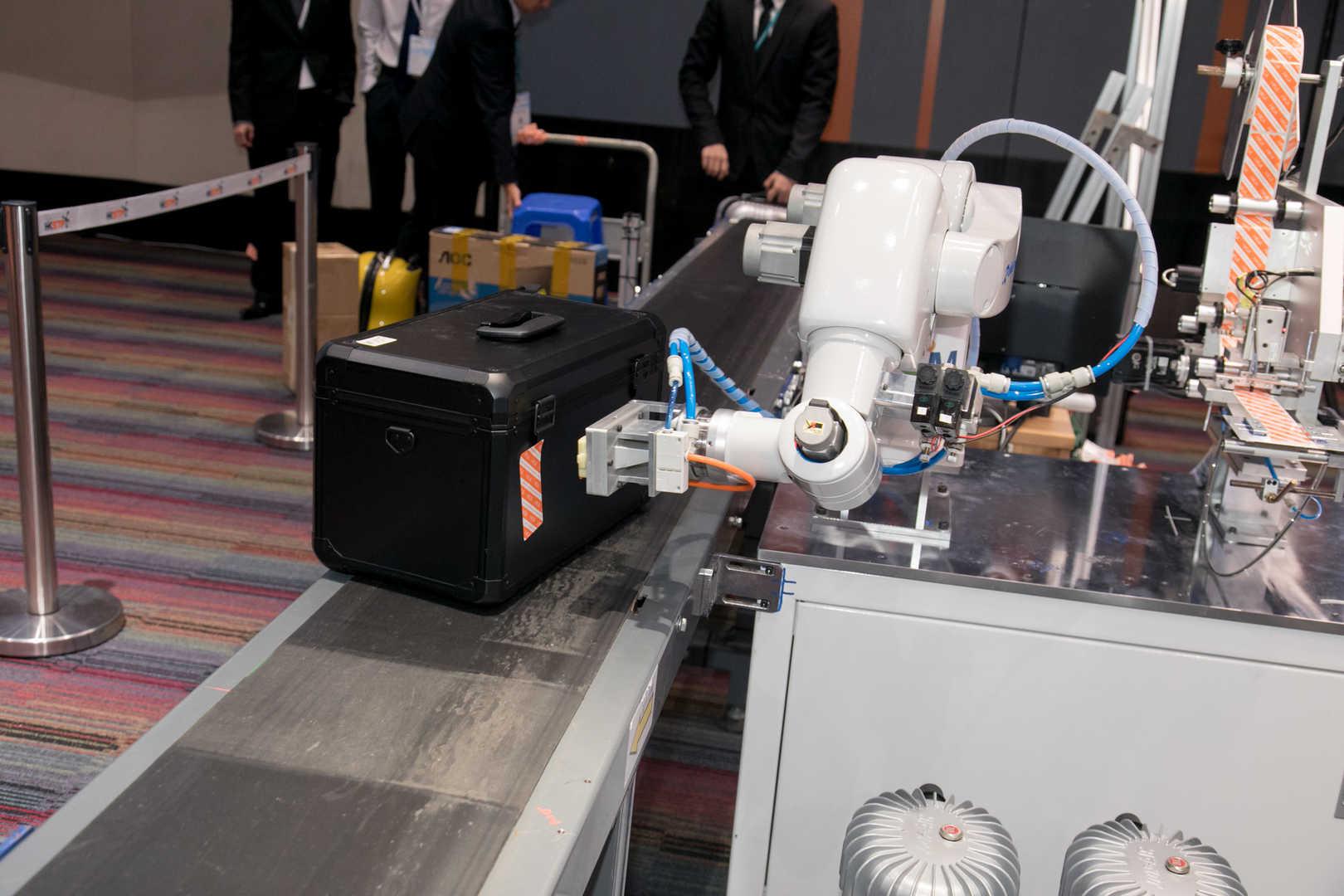
重複性工作容易令工人身體勞損,而且耗時。而服務機械人則可以代替人手進行重複性工作,例如利用機械臂於行李上張貼標簽,不但能減少工人的勞損,亦能節省時間。
創新技術
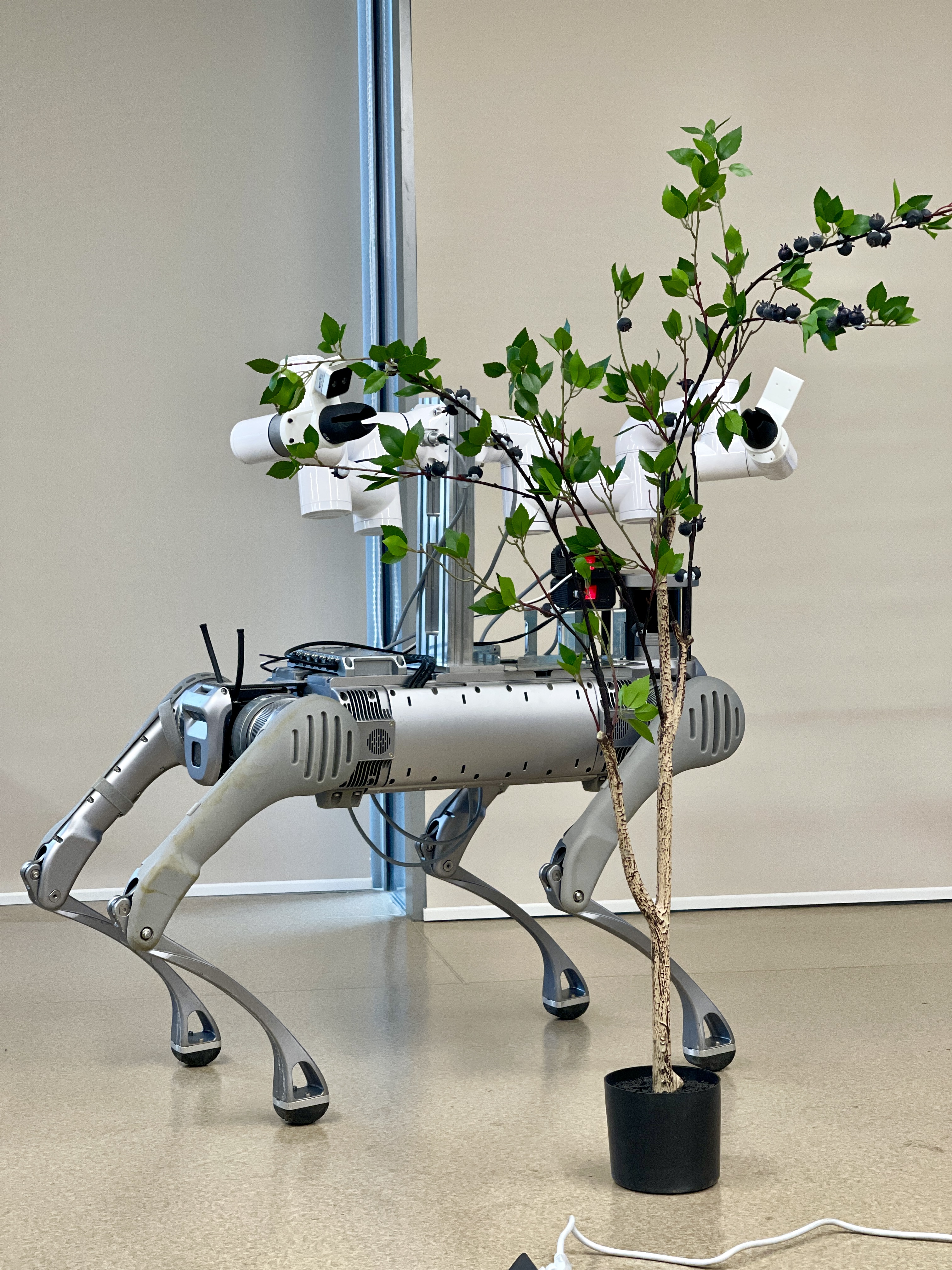
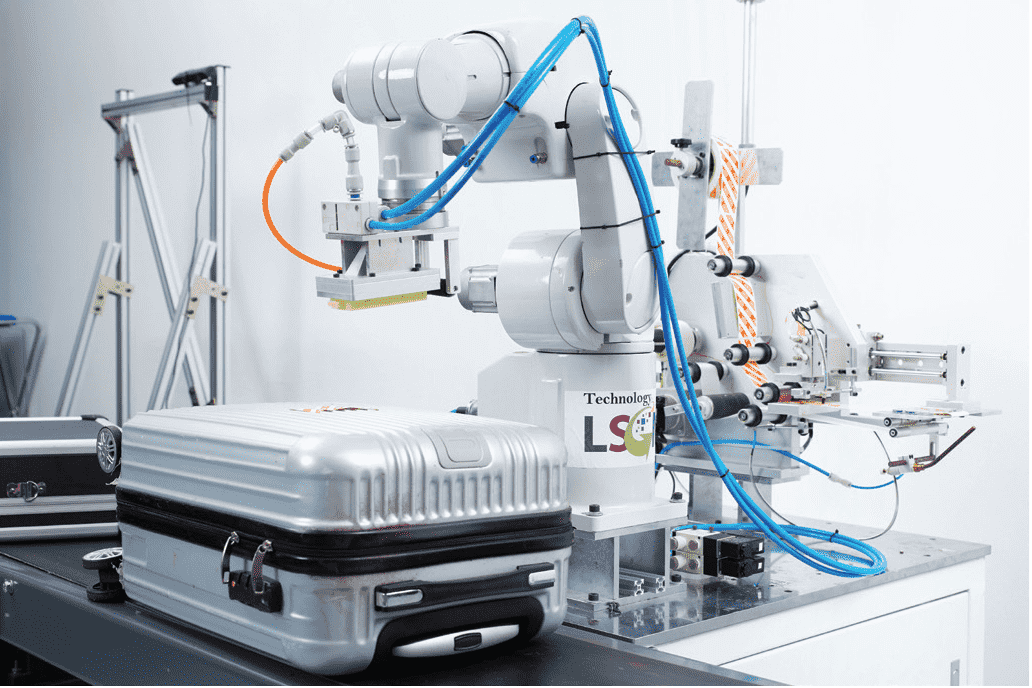
- RGB−D視覺系統將行李的形狀、尺寸和表面紋理的資訊發送給氣動末端執行器,進行標籤黏貼。機械學習演算法會把接收到的3D模型和RGB圖像進行分析,從而即時劃分物件的位置。
- 當末端執行器偵測到物件,並把它鎖定為目標物件後,表面擬合演算法便會應用到3D模型中,從而在行李上找出適合黏貼標籤的位置。
- 氣動末端執行器使用真空氣泵,從盛載標籤的容器中吸起標籤,然後模仿手動黏貼標籤的方法,使用空氣噴射將標籤貼在行李上。
主要成效
- 服務機械人可以代替人手,進行張貼標籤的重複性工作,減少工人的勞損。
- 此技術已在香港國際機場(HKIA)試行,以便在真實的工業環境中應用。
應用範疇
- 張貼行李標籤
物流及供應鏈多元技術研發中心
物流及供應鏈多元技術研發中心(LSCM)於 2006 年成立,獲特區政府創新及科技基金撥款資助,並由香港大學、香港中文大學和香港科技大學恊辦;旨在提供一站式應用研發及技術轉移服務,鞏固本地物流及相關行業的發展,並加強業界與研發機構在應用研究方面的合作,為業界和社會帶來具意義和影響力的效益。
LSCM為業界提供技術研究項目、合約研究項目、業務配對、技術轉移及知識產權商品化服務等,並透過技術轉移將技術及相關知識推向市場,鼓勵業界數碼轉型,協助業界提升效率,從而鞏固香港作為首屈一指的物流與商貿樞紐之地位。
查詢