用于随机取放的视觉引导工业机器人
简介
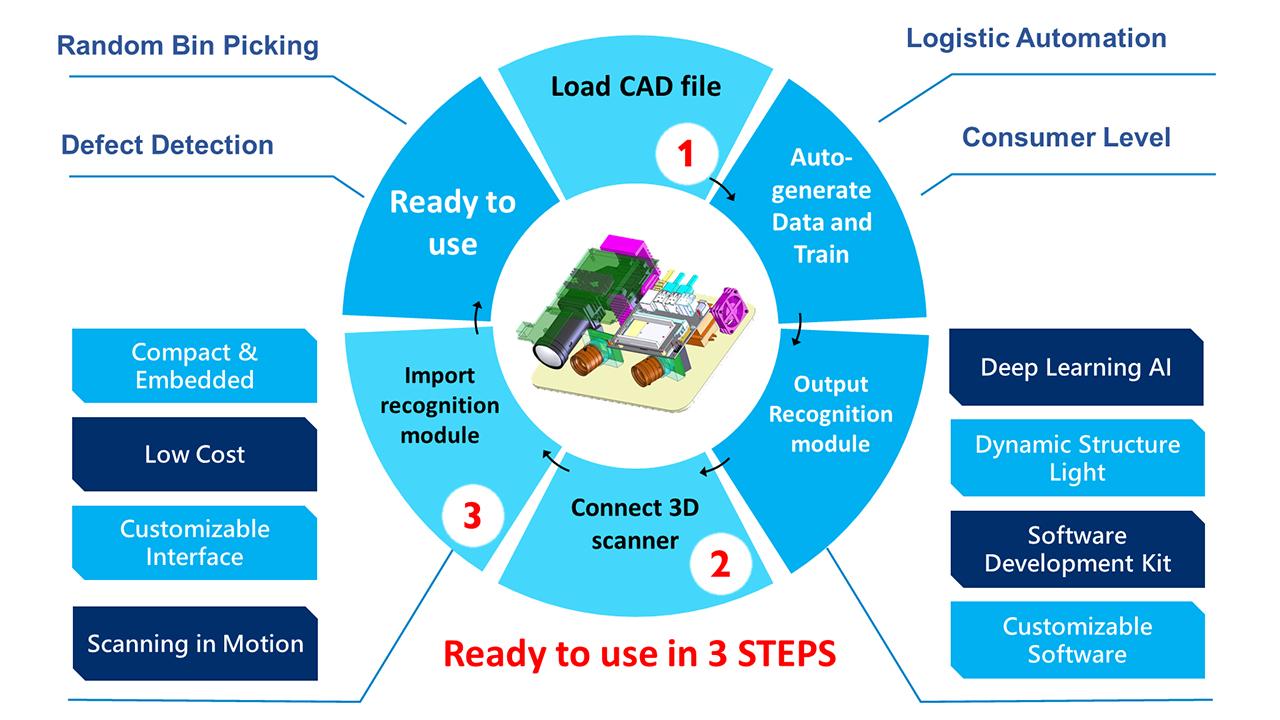
一种用于随机取放的嵌入式智能3D物体识别系统。

创新技术名称
用于随机取放的视觉引导工业机器人
完成研究日期
2020年8月
商品化机会
知识产权授权;技术合作开发
解决方案
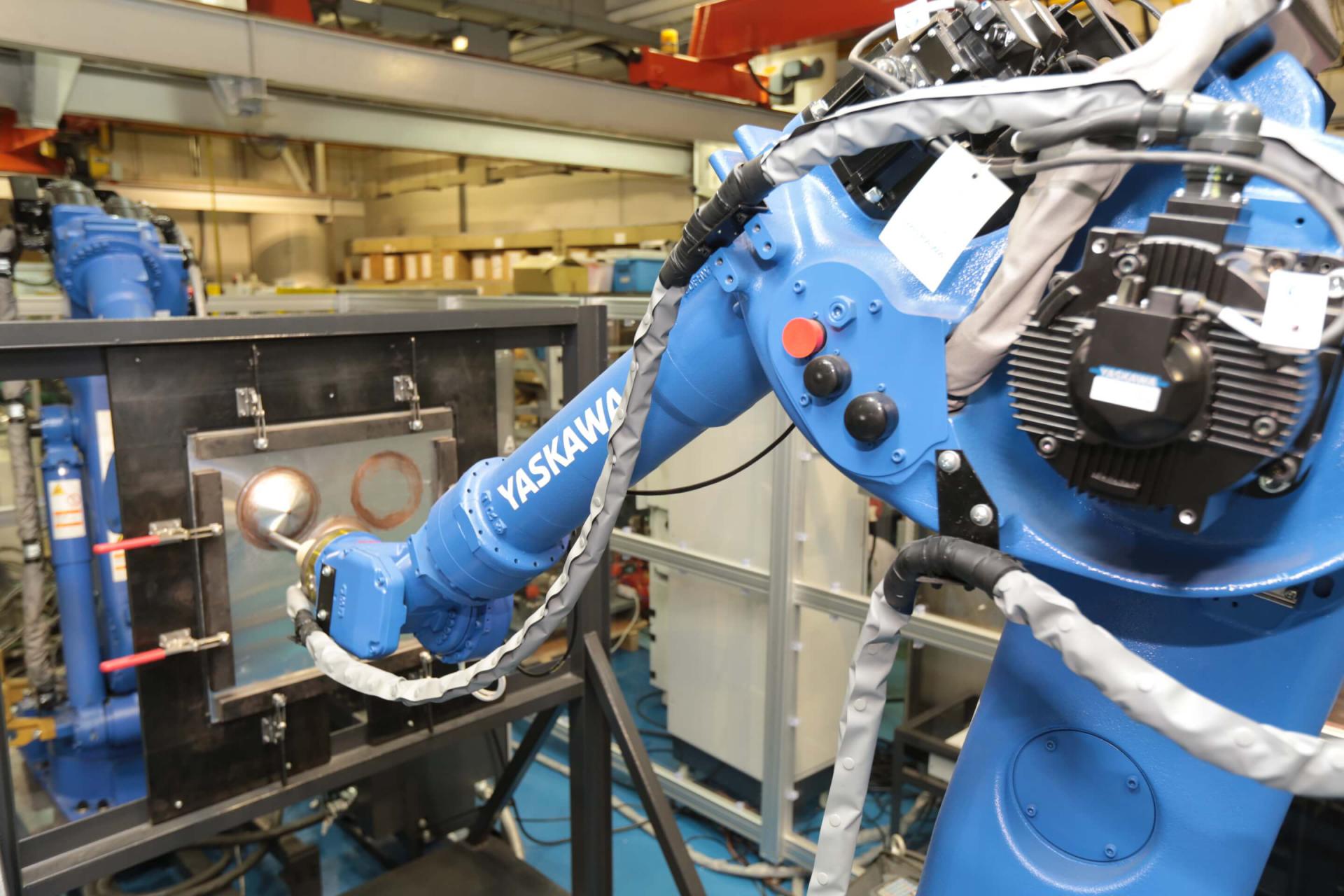
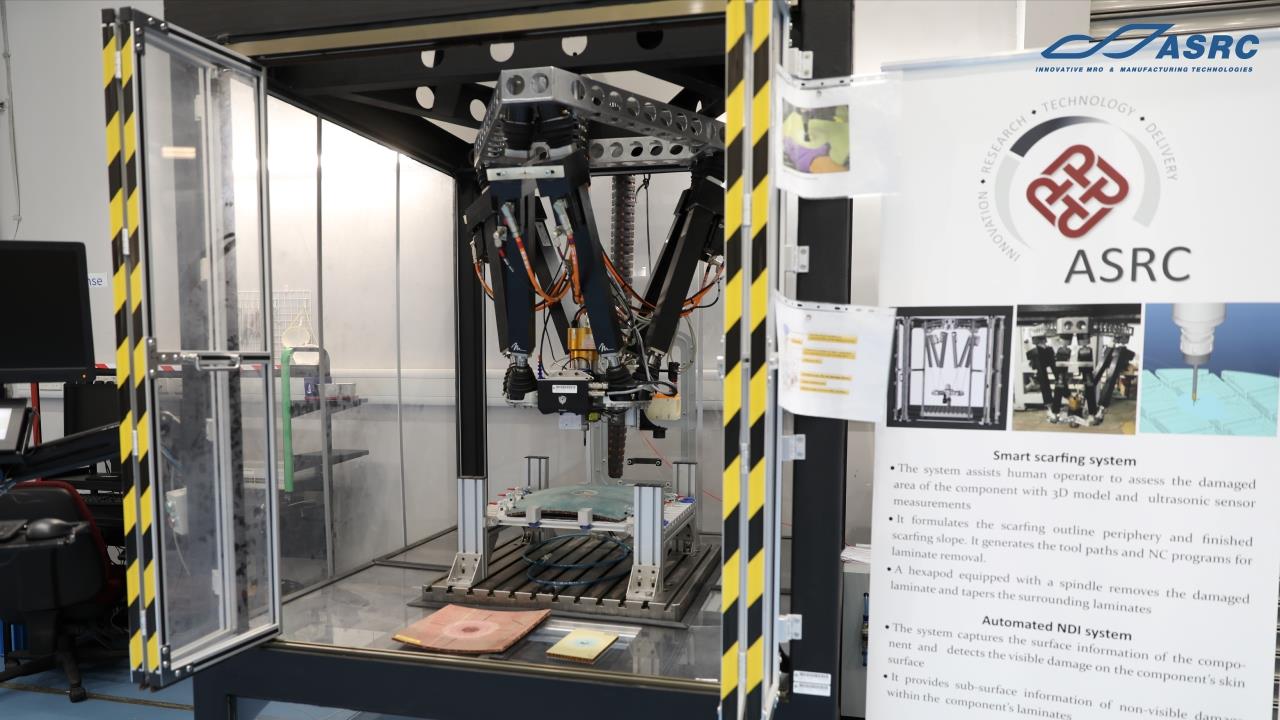
传统自动化所使用的机械人,都是一成不变地按照高技能工程师精心制作的程序,重复执行特定动作。这些机器人既不灵活,更不适合生产那些产品生命周期短的商品。在高效生产线上,必须实时进行零件检测和姿态估计。
创新技术
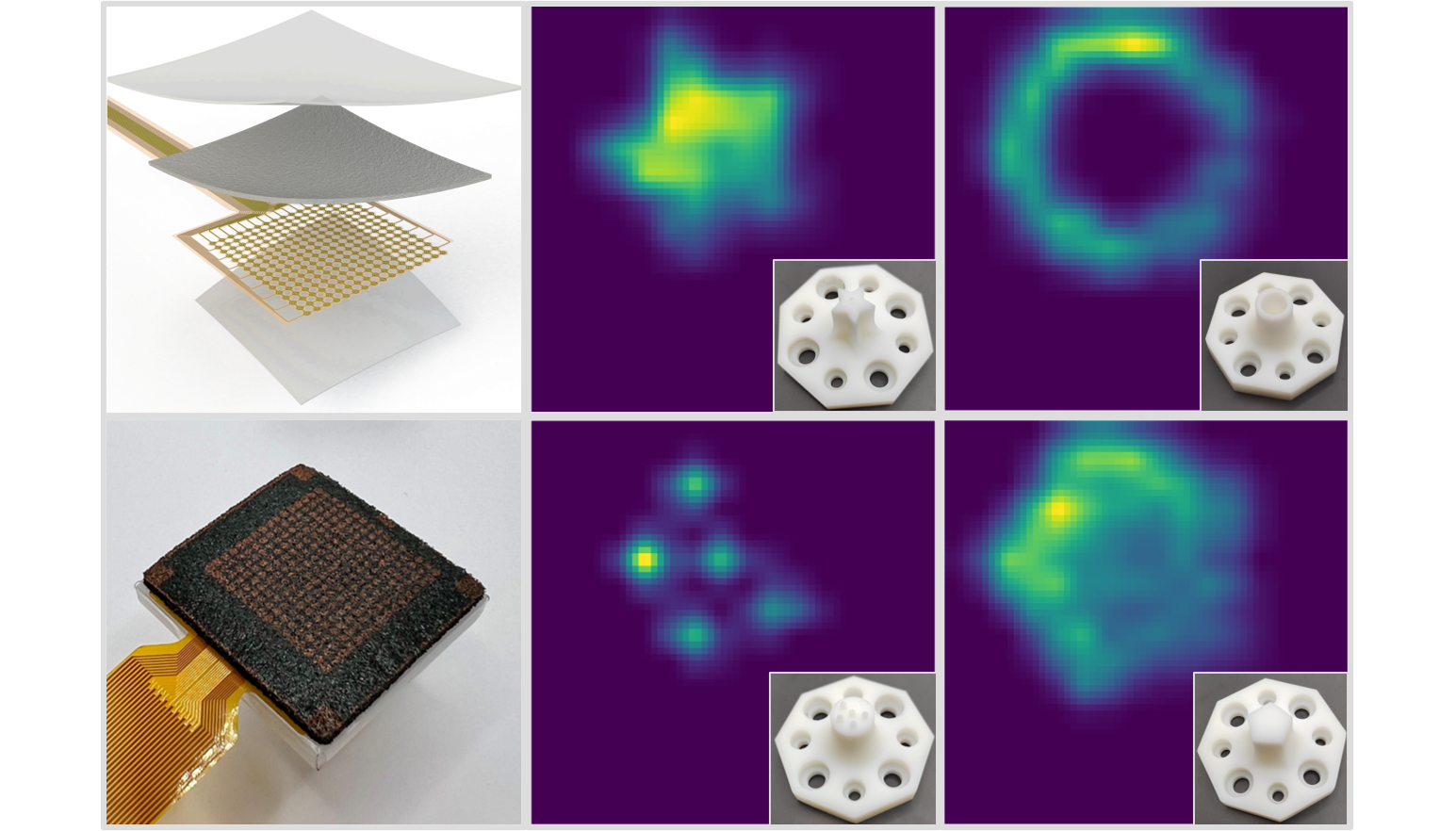
- 数据生成引擎:通过 3D 引擎生成人工智能训练数据,无需手动标记。
- 深度学习:通过人工智能提取对象特征,以训练合适的模型,无需手动调整新对象的参数。
- 自适应光学设计:采用编码相移光模式和双偏振光学设计,系统自动适应不同的生产线环境和多个测量对象。
- GPU加速点云处理:将GPU加速算法应用于对象识别,以确保速度(<0.5秒的3D识别时间)和准确性(0.1mm @ 0.5m)。
主要成效
- 通过对多种产品进行高效的重新配置,提高生产线的灵活性。
- 以低成本提高生产线的产量。
- 灵活的尖端3D机器人认知能够加速本地产业升级,以先进的制造技术执行复杂任务。
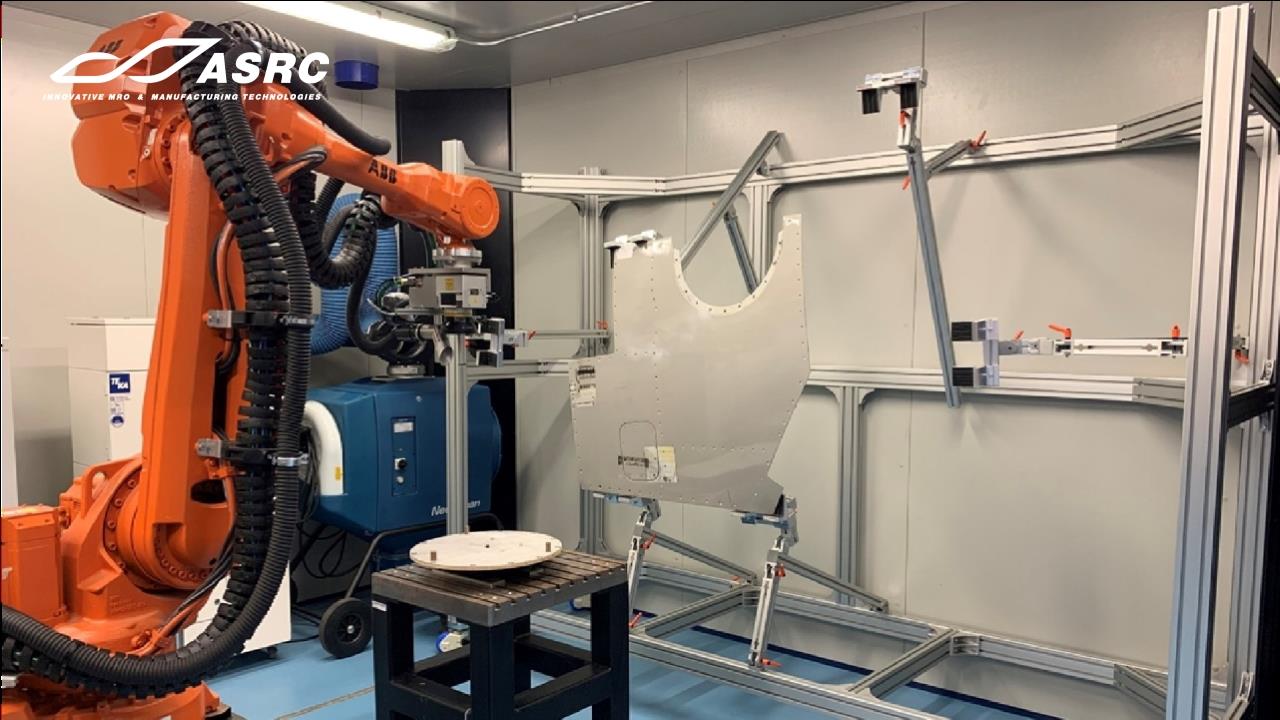
应用范畴
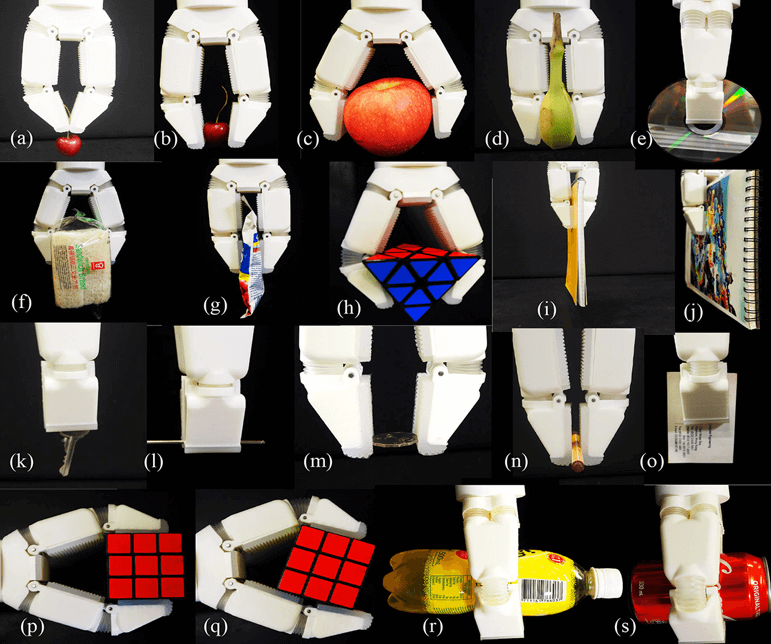
- 随机取放
- 缺陷检查
- 部件
- 自主机器人导航
专利申请
- 美国专利号 11,287,626 和中国申请号 201980000804.2
- 美国专利号 11,023,770,中国申请号 201980002023.7 和香港申请号 62020022213.6
香港应用科技研究院
香港应用科技研究院(应科院)由香港特别行政区政府于2000年成立,其使命是透过应用科技研究提升香港的竞争力。应科院的主要科技研发领域可归纳于四个技术部门,包括:可信及人工智能技术、通讯技术、物联网感测与人工智能技术、集成电路及系统。而技术研发主要应用在六项重点范畴:智能城市、金融科技、新型工业化及智能制造、数码健康科技、专用集成电路及元宇宙。
查询