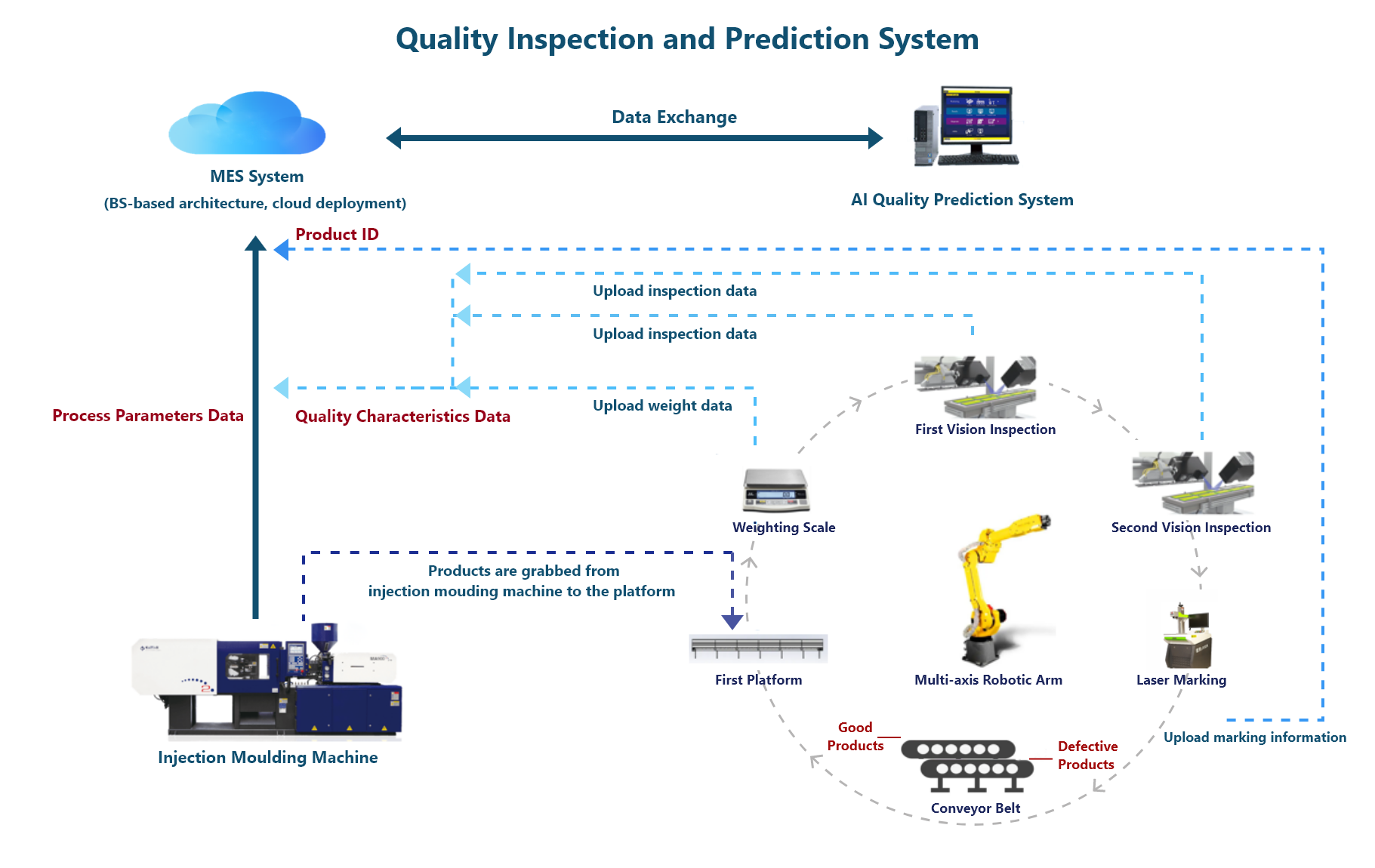
深度视界面阵结构光三维相机

简介
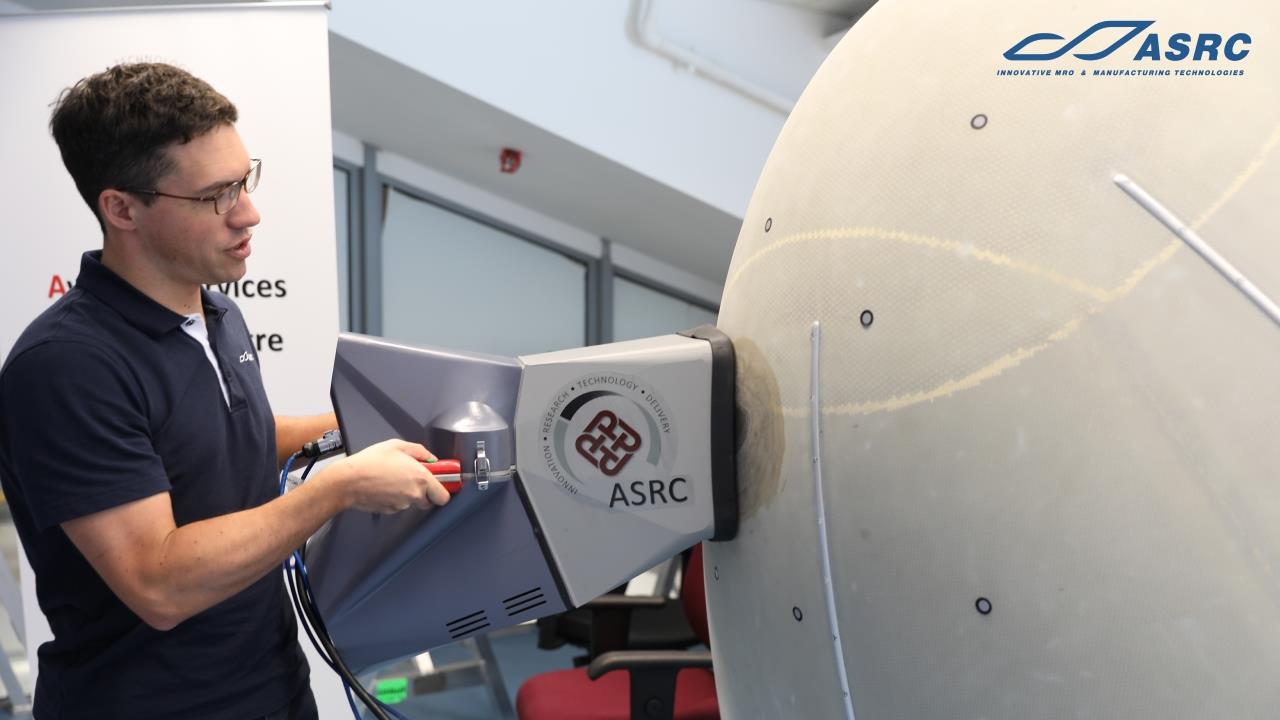
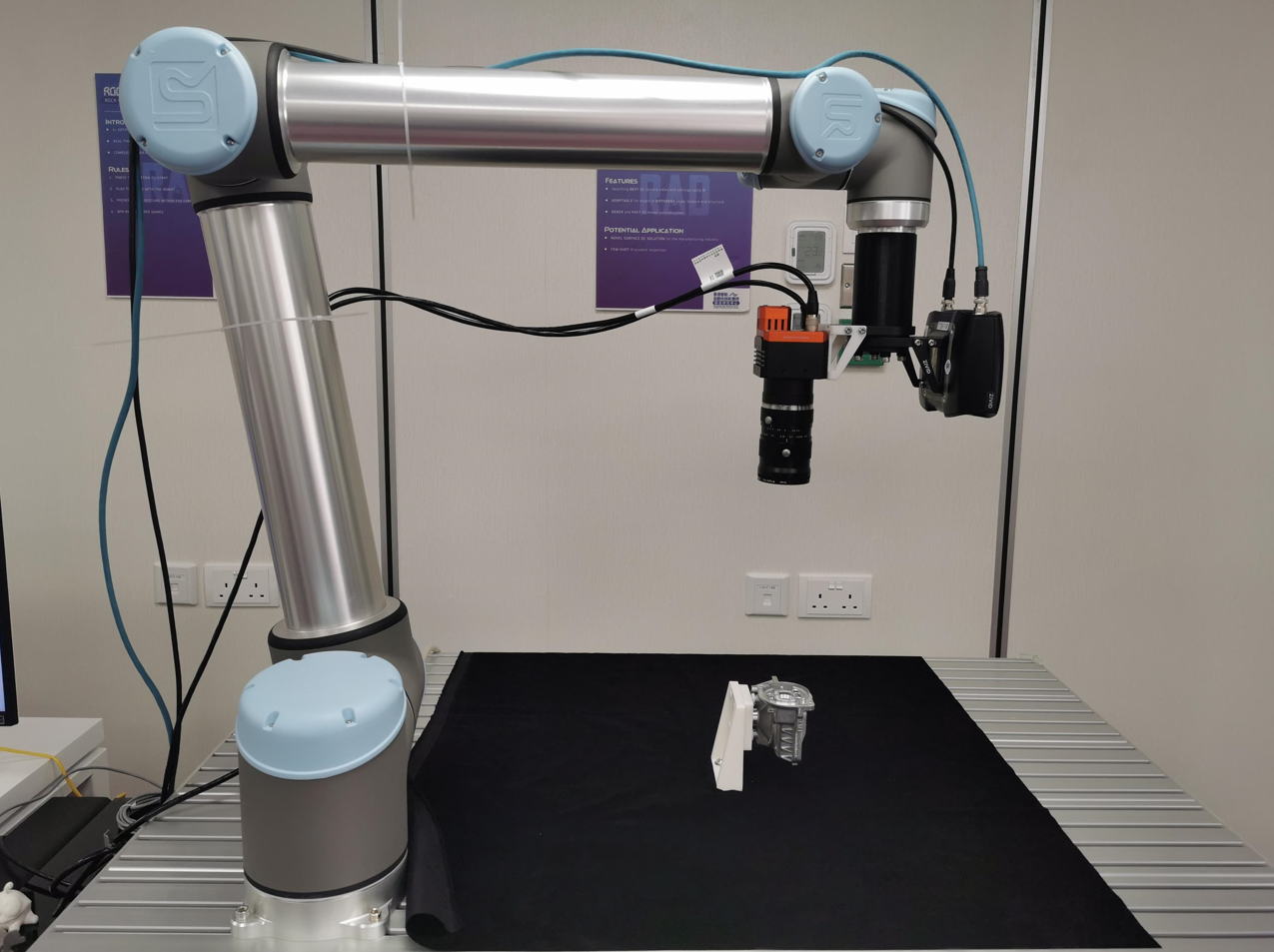
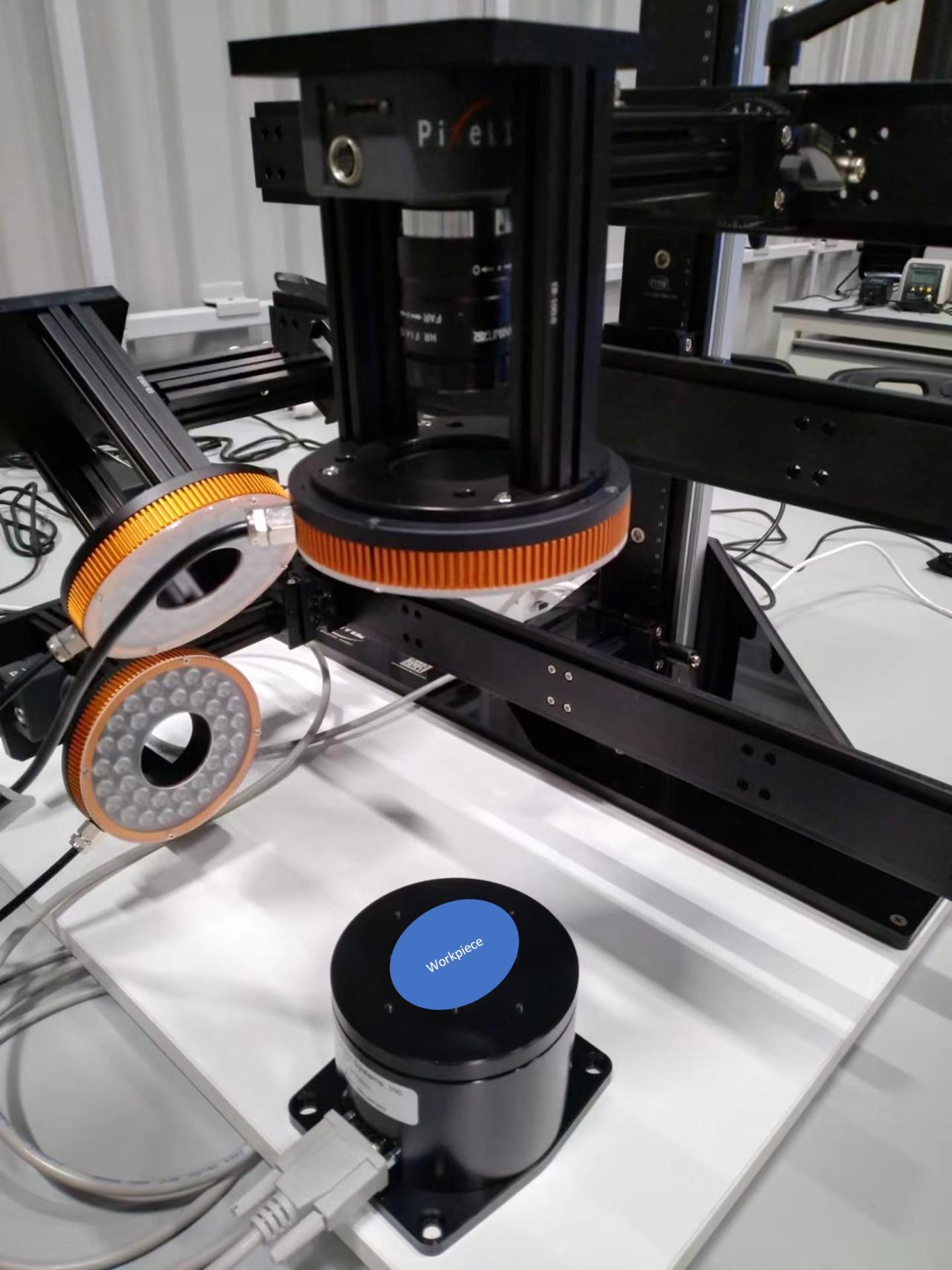
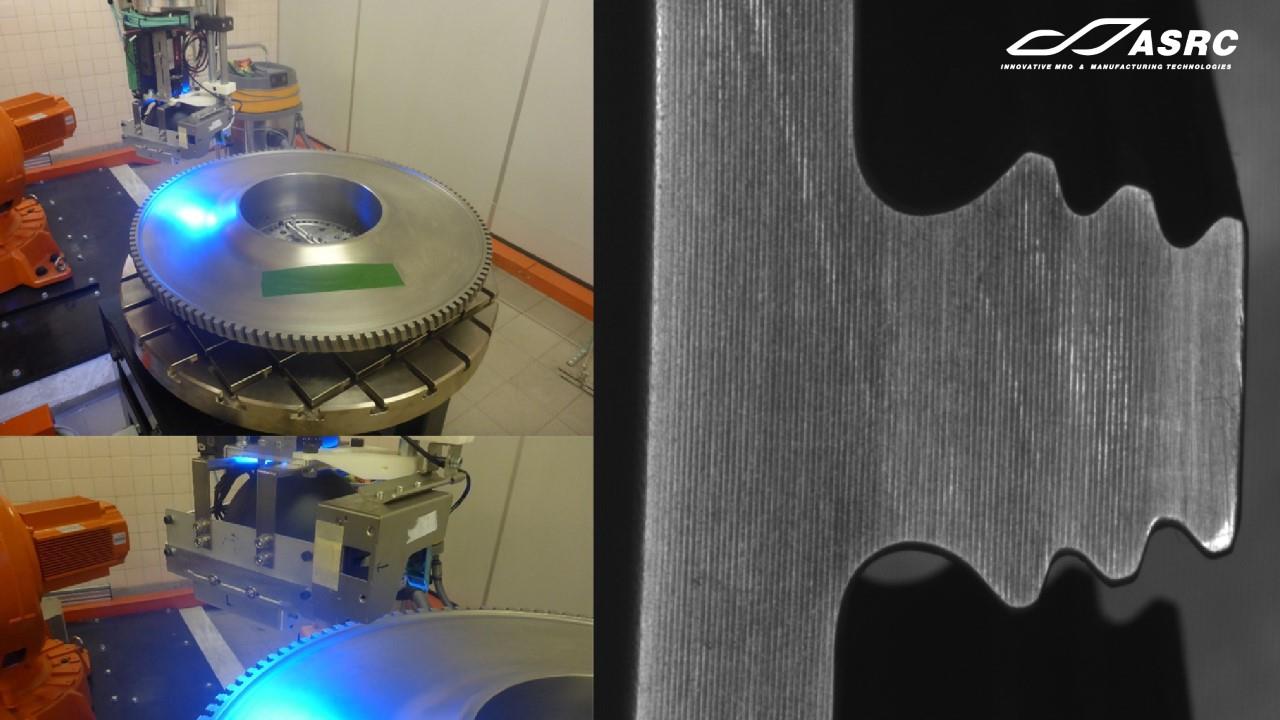
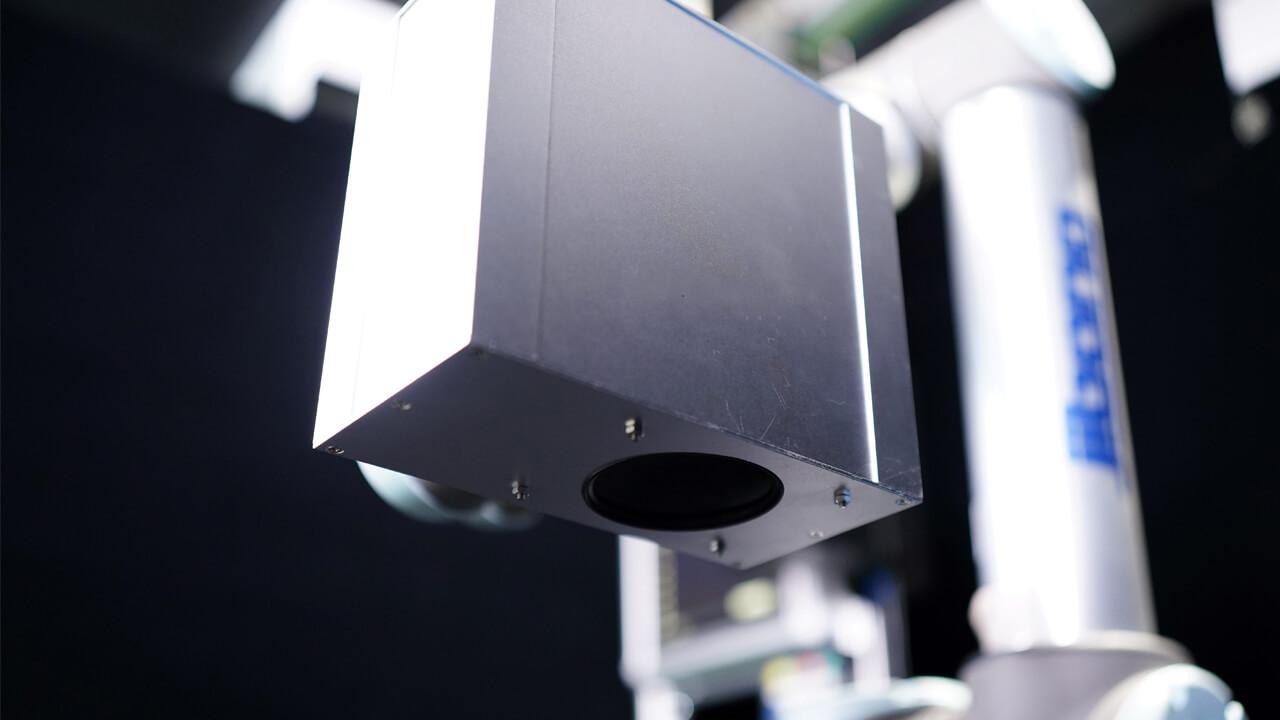
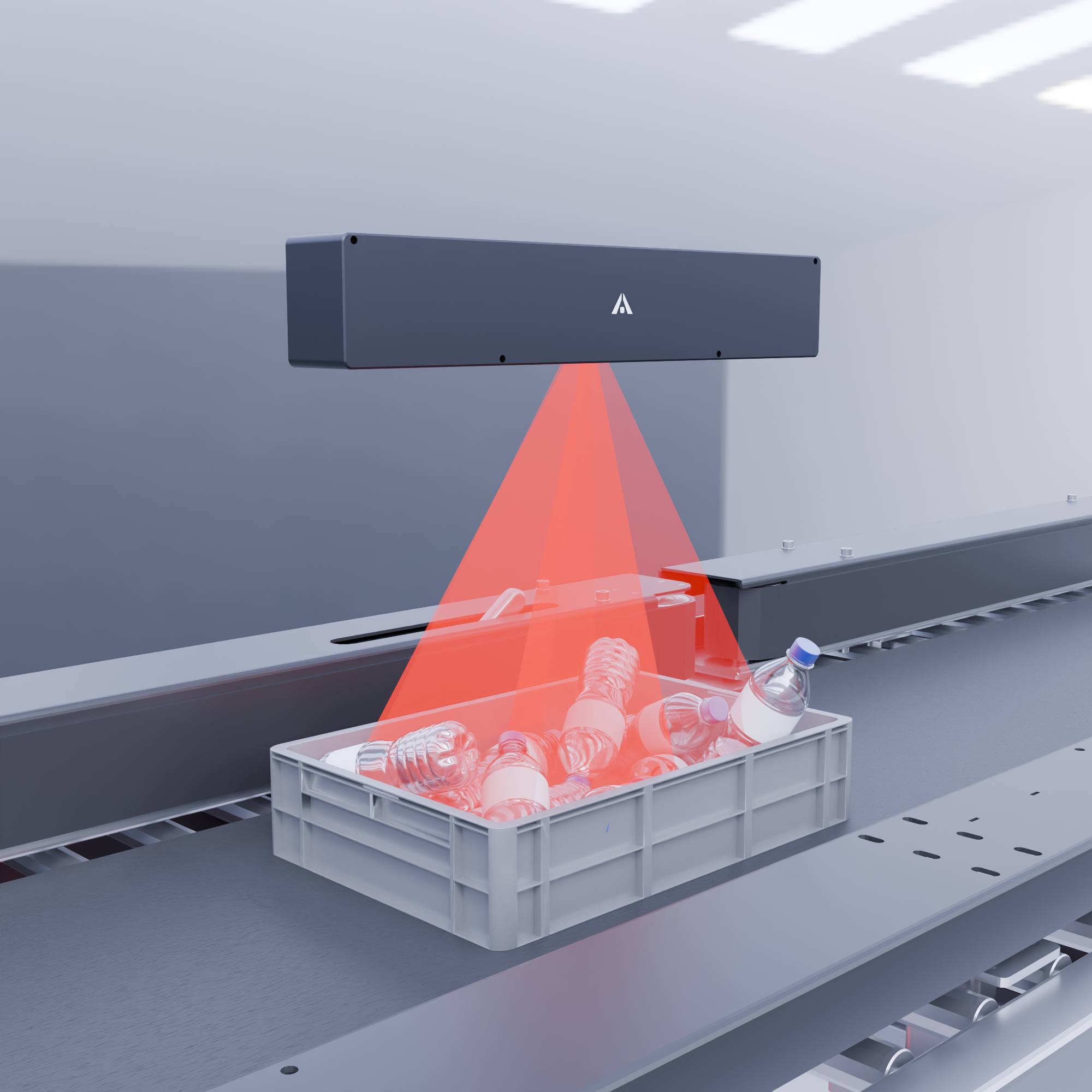
DS-A系列深度视界面阵结构光三维相机为自主研发的投影式面阵结构光3D相机,适用于工业检测领域,与固定式引导测量和机械臂结合的引导场景契合度高。

商品化机会
产品销售
解决方案
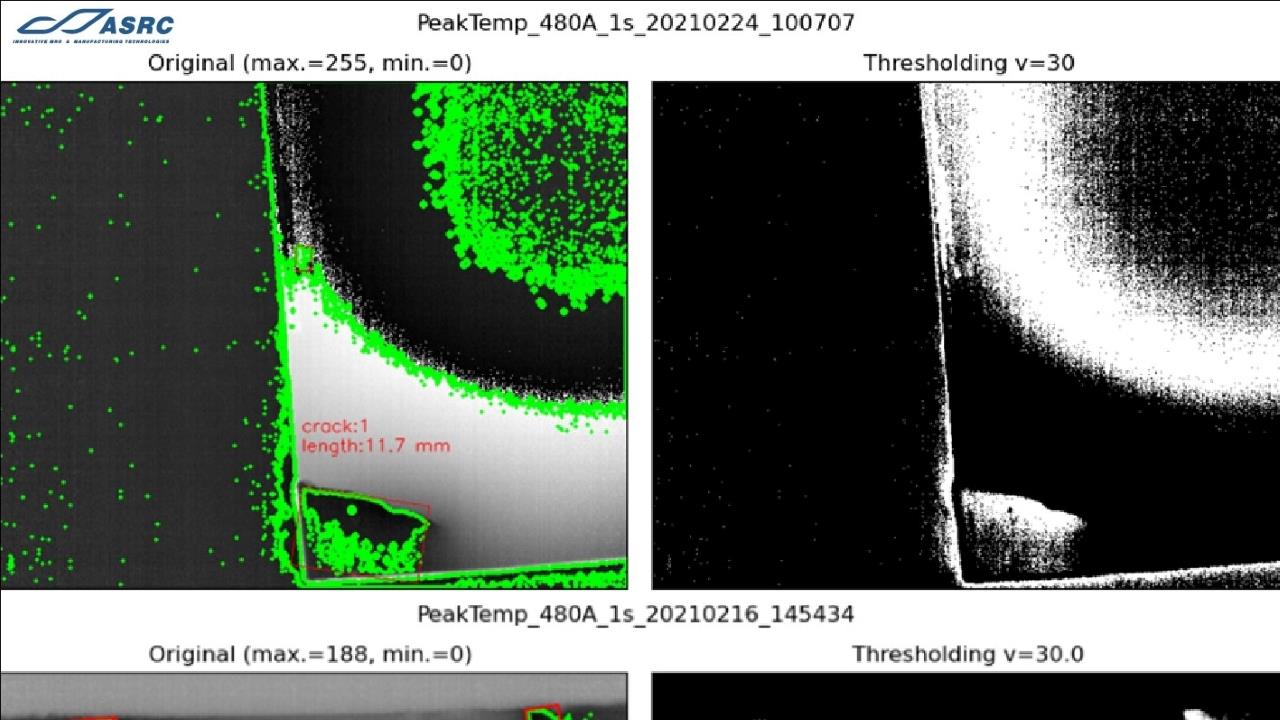
本产品旨在通过采集物体与环境的三维点云数据,实现单目标分割、表面质量检测及语义解析功能,为机器人提供精准的环境感知能力,以完成多样化工业任务。
创新技术
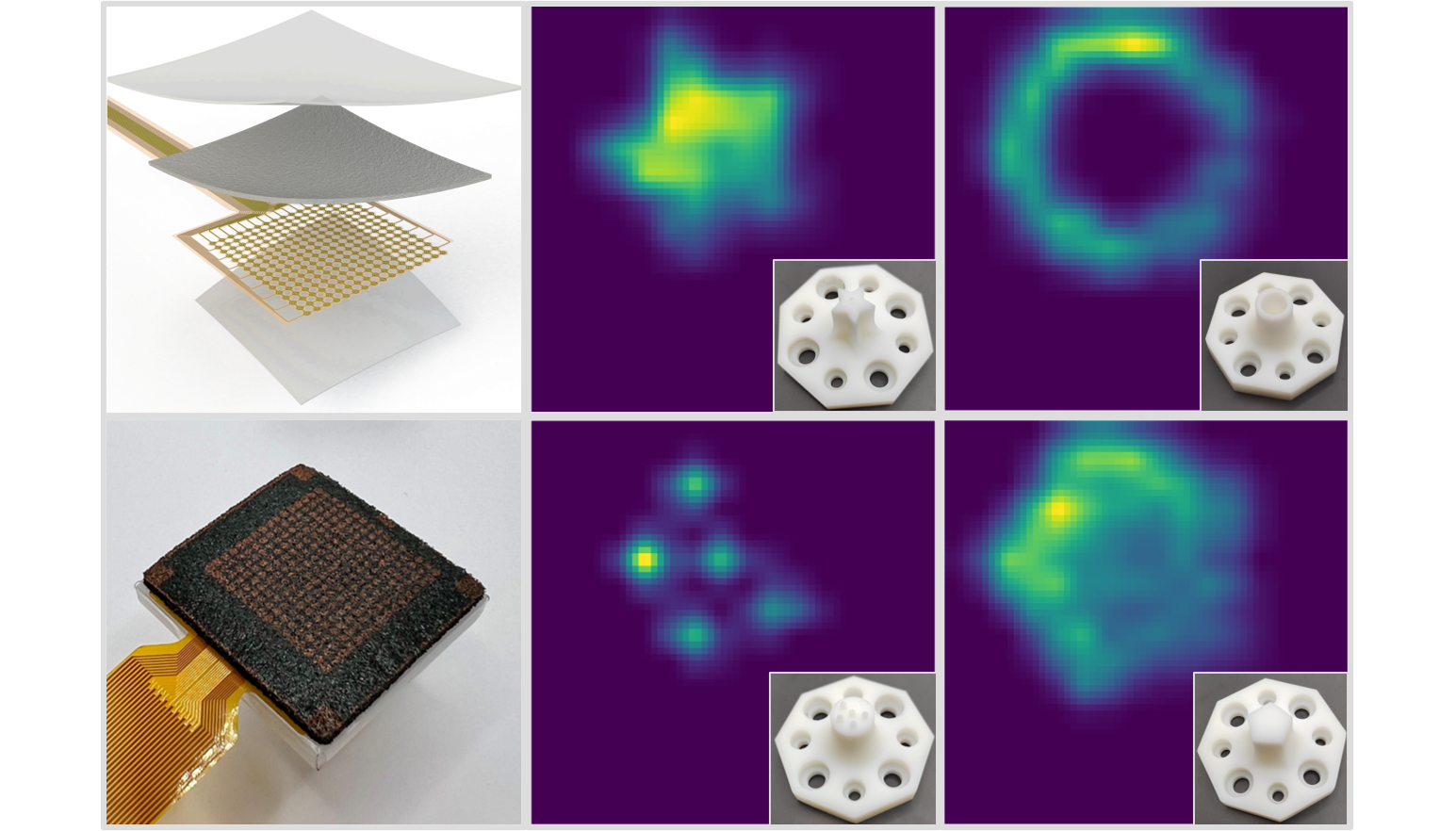
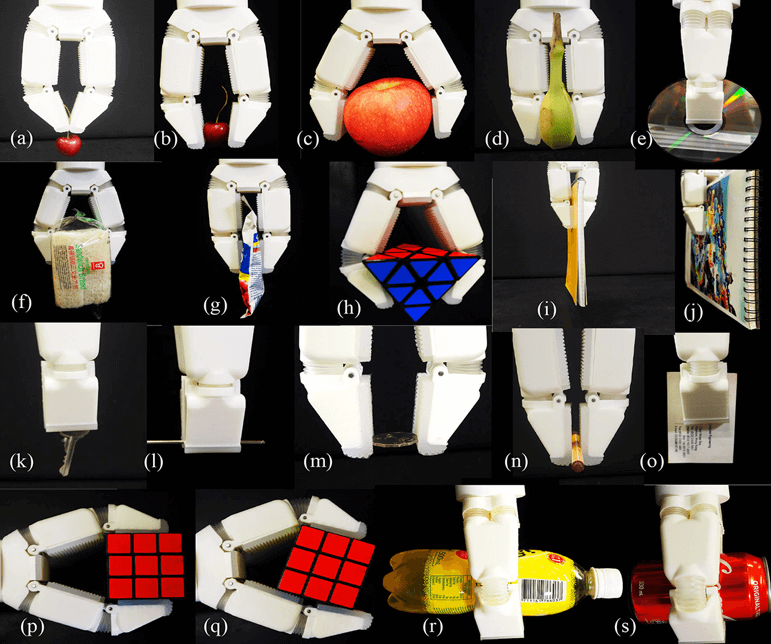
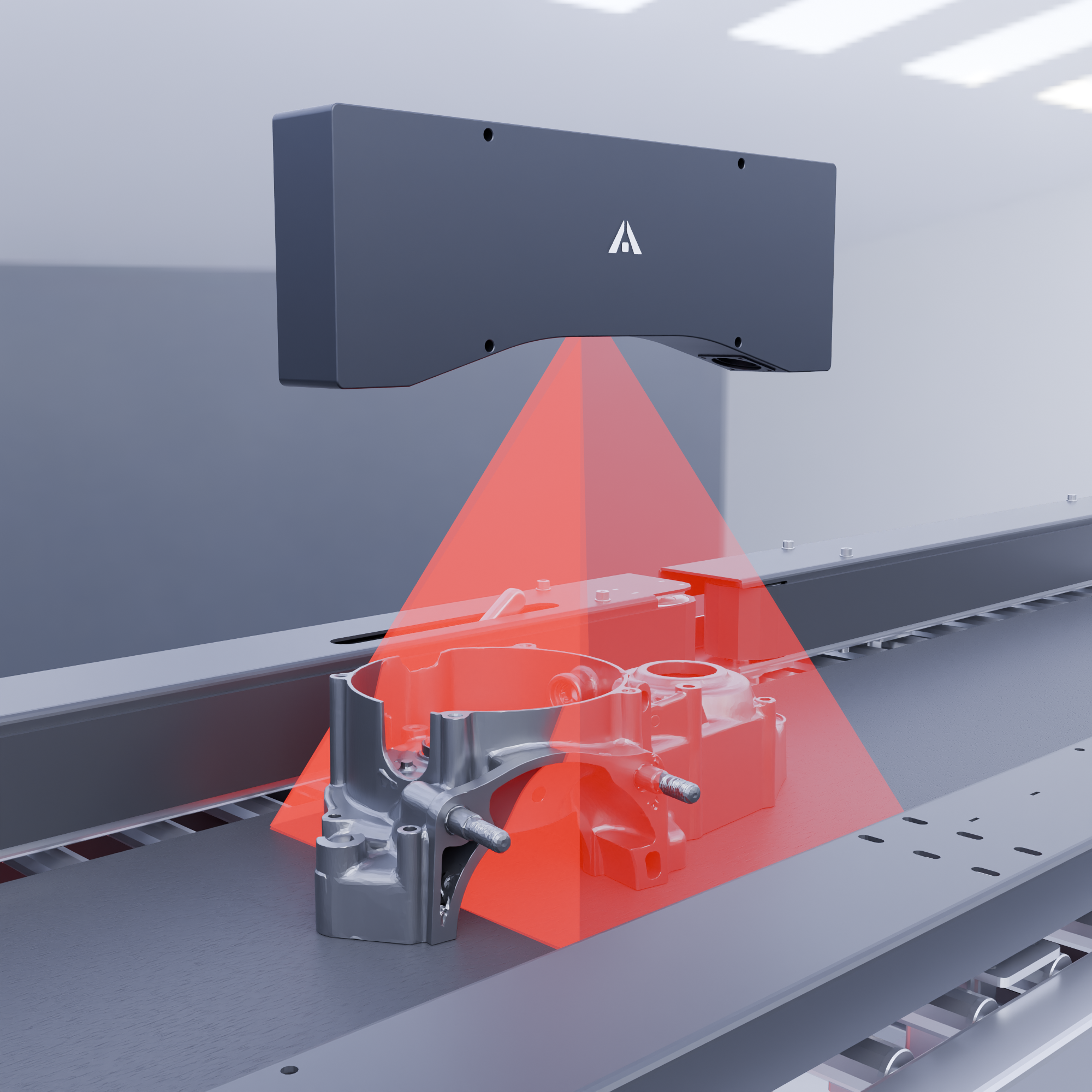
- 双目相机方案及自研的匹配算法可解决工业场景中的物体遮掩及反光问题,同时保证成像质量。
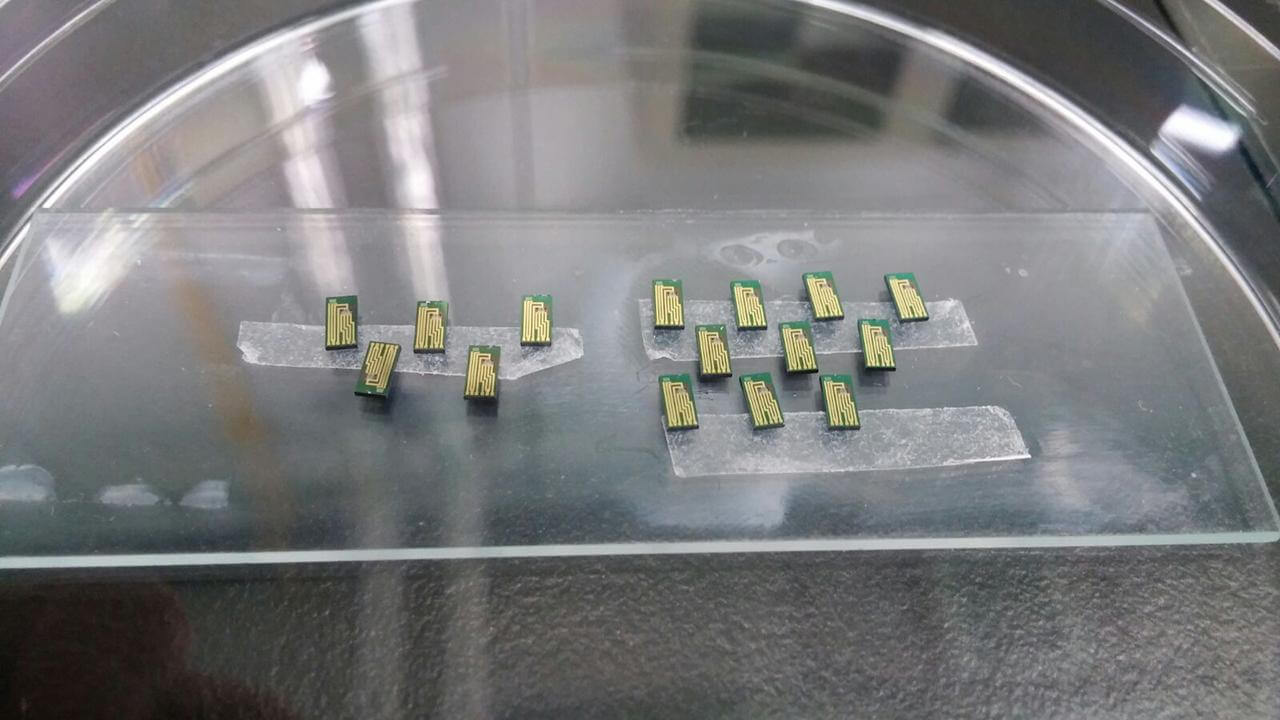
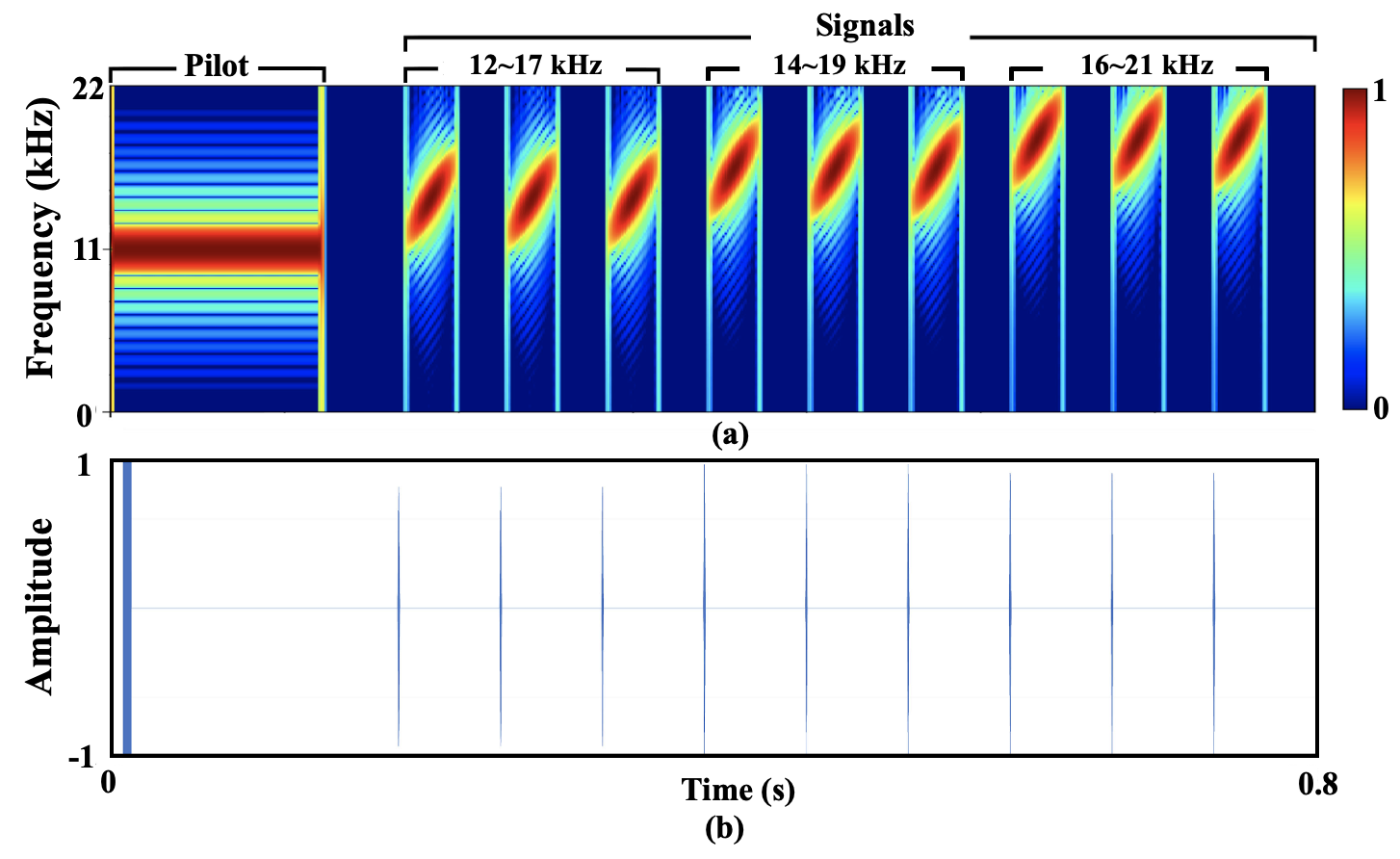
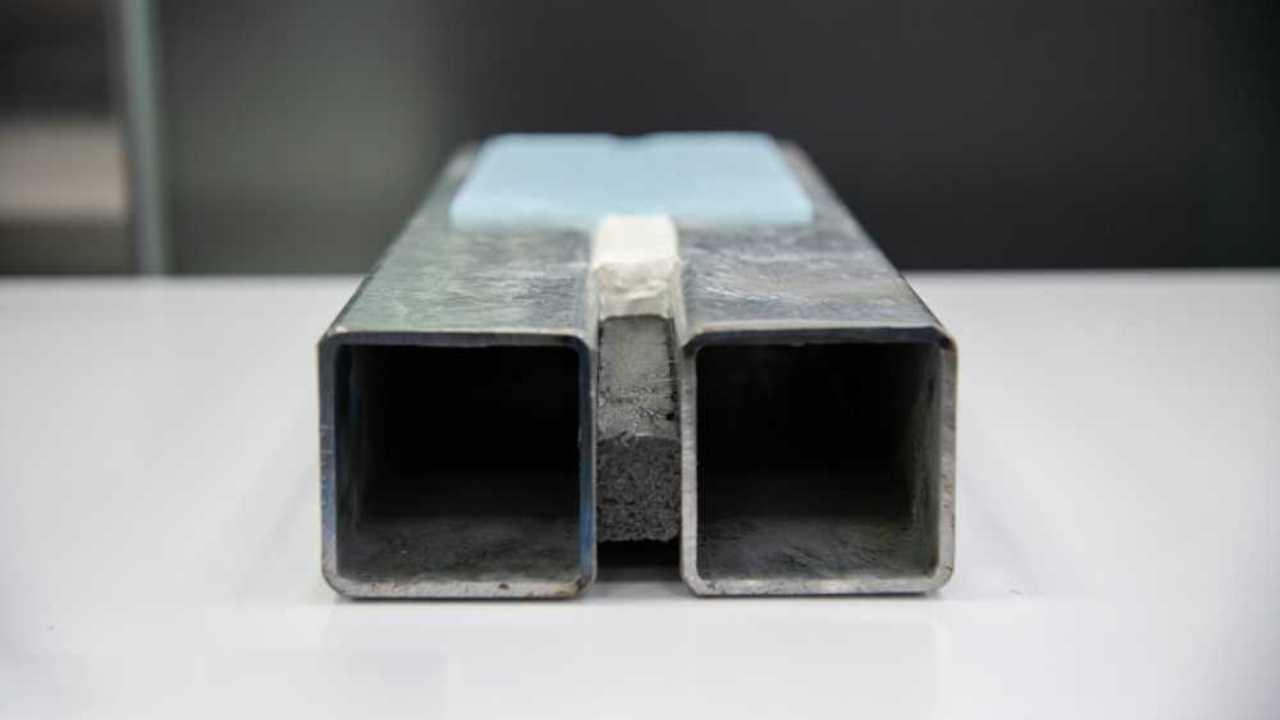
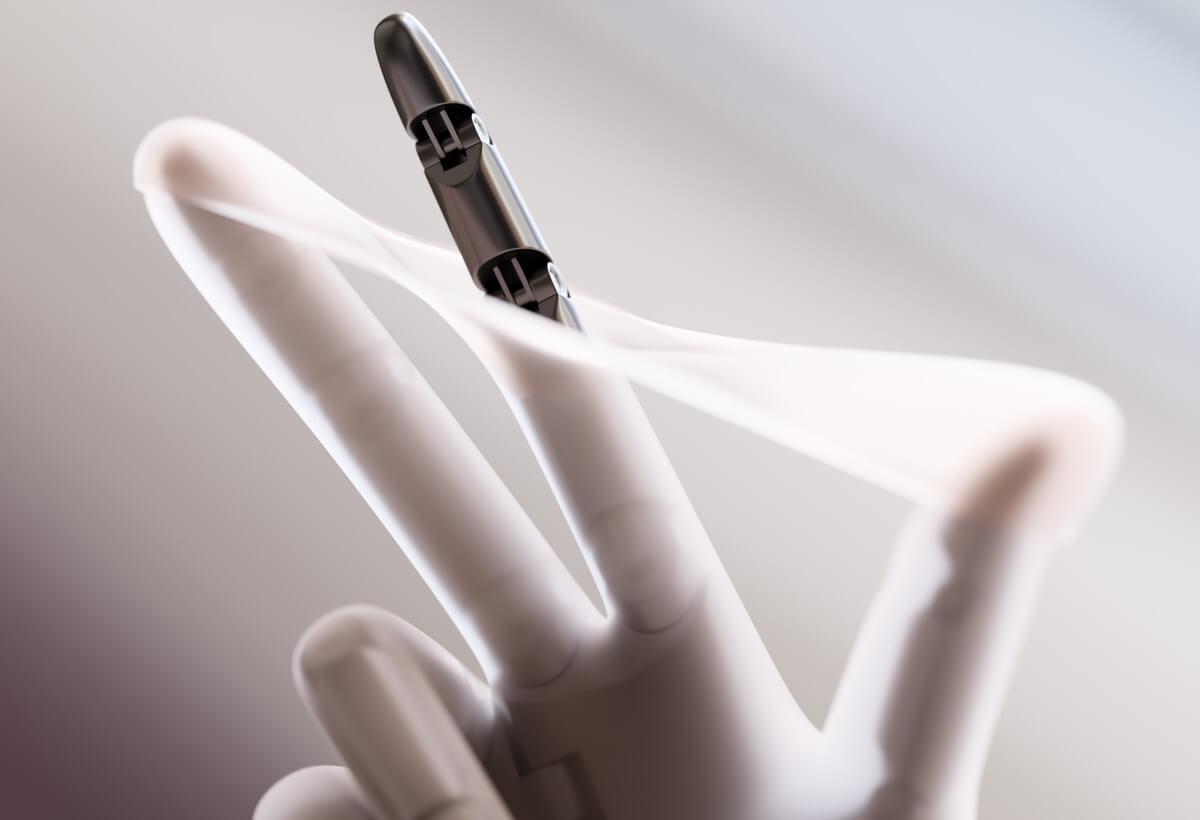
- 自研条纹结构光和线结构光结合技术可实现透明材质物体的重建。
- 500万分辨率的大点云数据输出,可实现更高精度质量检测和引导,重复测量精度可达微米级别。
主要成效
- 自研条纹结构光和线结构光结合技术可实现透明材质物体的重建,比如充气泡沫,化妆瓶的点云重建。
- 紧凑的结构设计在同样的工作距离下可以实现更大扫描视野的覆盖。
- 双目相机方案及自研的匹配算法可解决工业场景中的物体遮掩及反光问题,同时保证成像质量。
- 稳固密闭的结构设计和长期稳定性测试,达到IP65防护等级,可以适应各种工业检测及引导场景。
奖项
- 第48届国际日内瓦创新发明展金奖
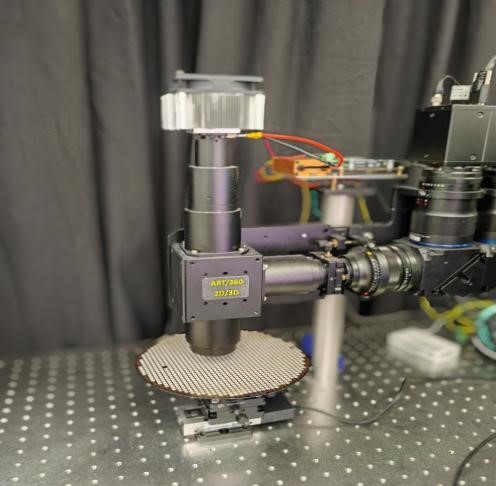
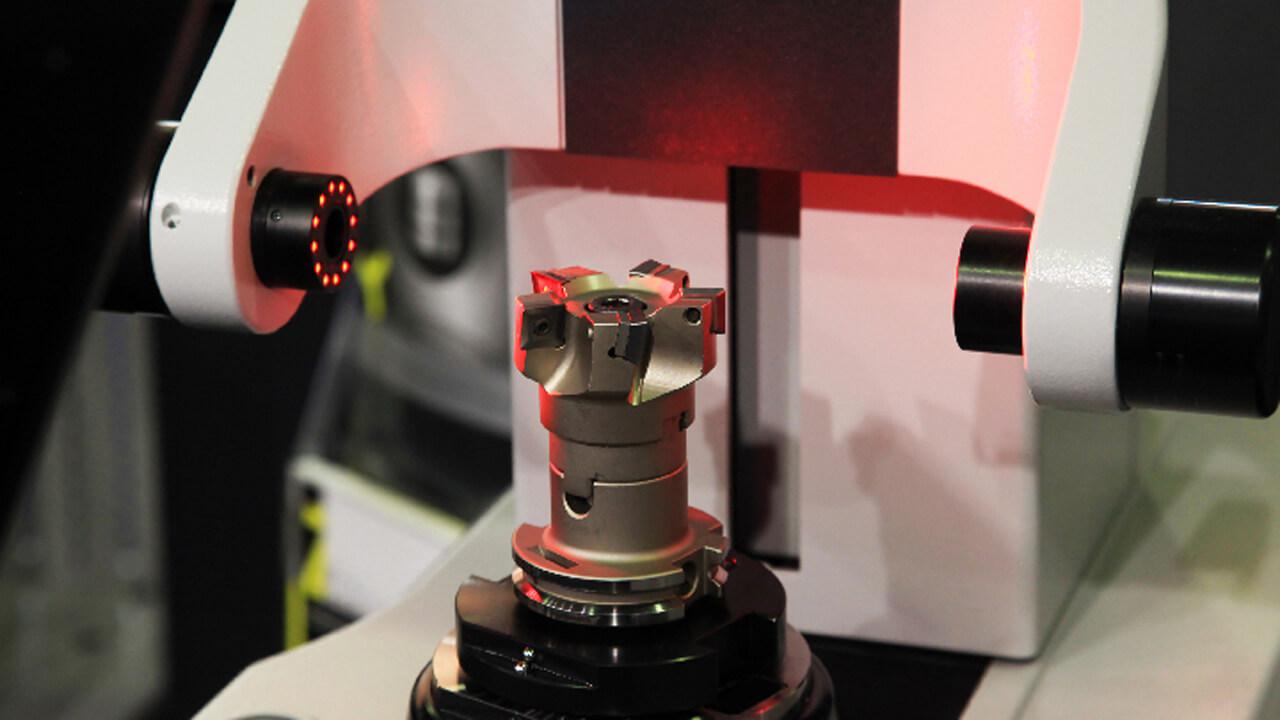
应用范畴
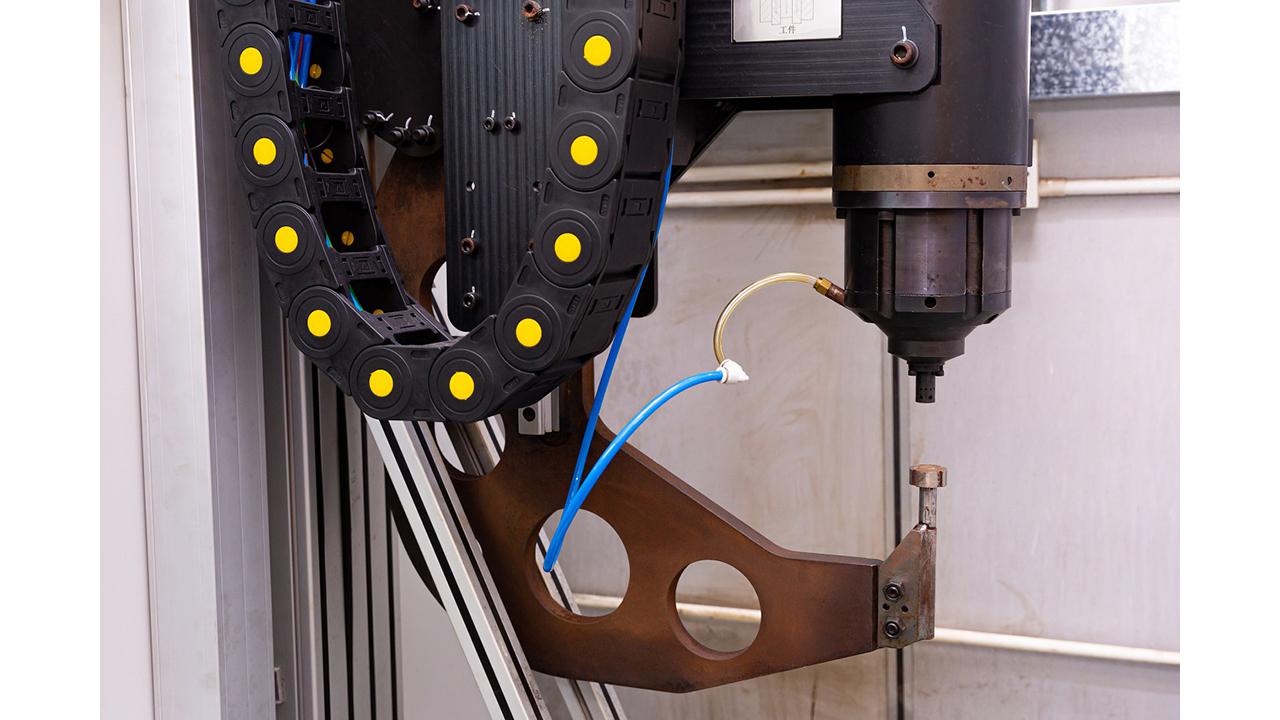
- 智能制造 - 汽车零部件的质量检测
- 智能物流 - 机器人引导及分拣
- 智能工厂 - 机器人物料装配
专利申请
- 成像方法、传感器、三维形状重建方法及系统
- 透明物體三維重建之方法、裝置及系統
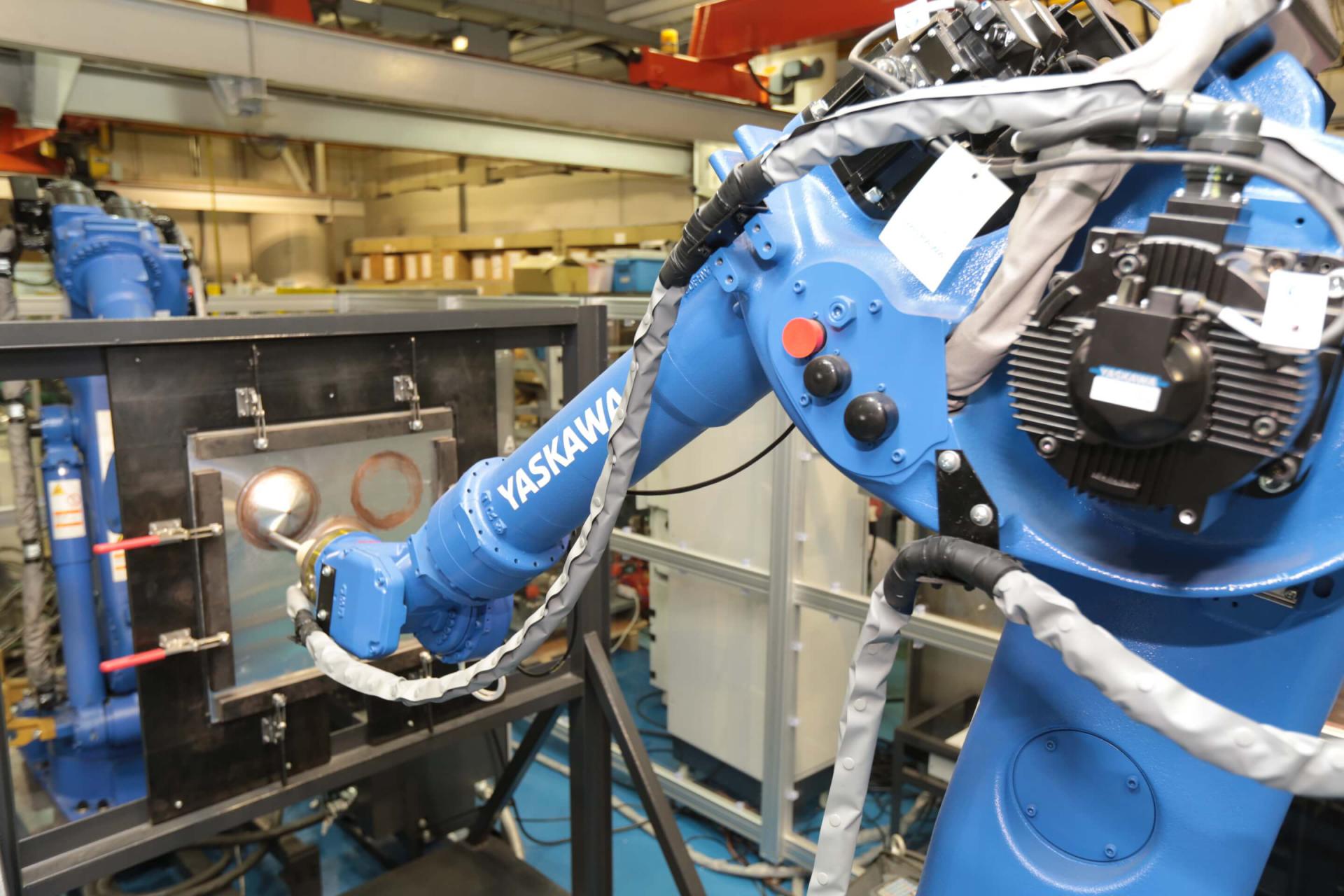
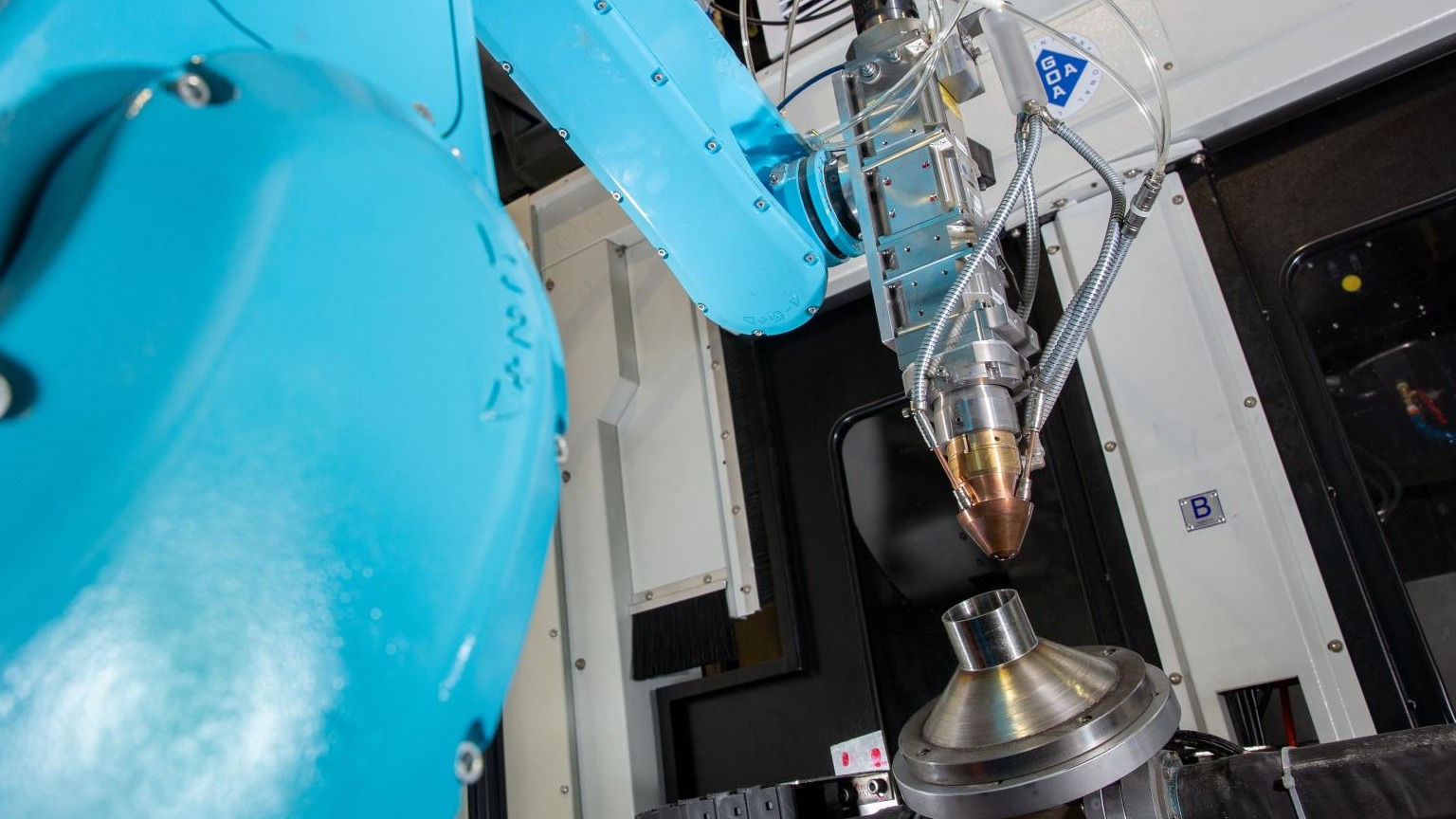
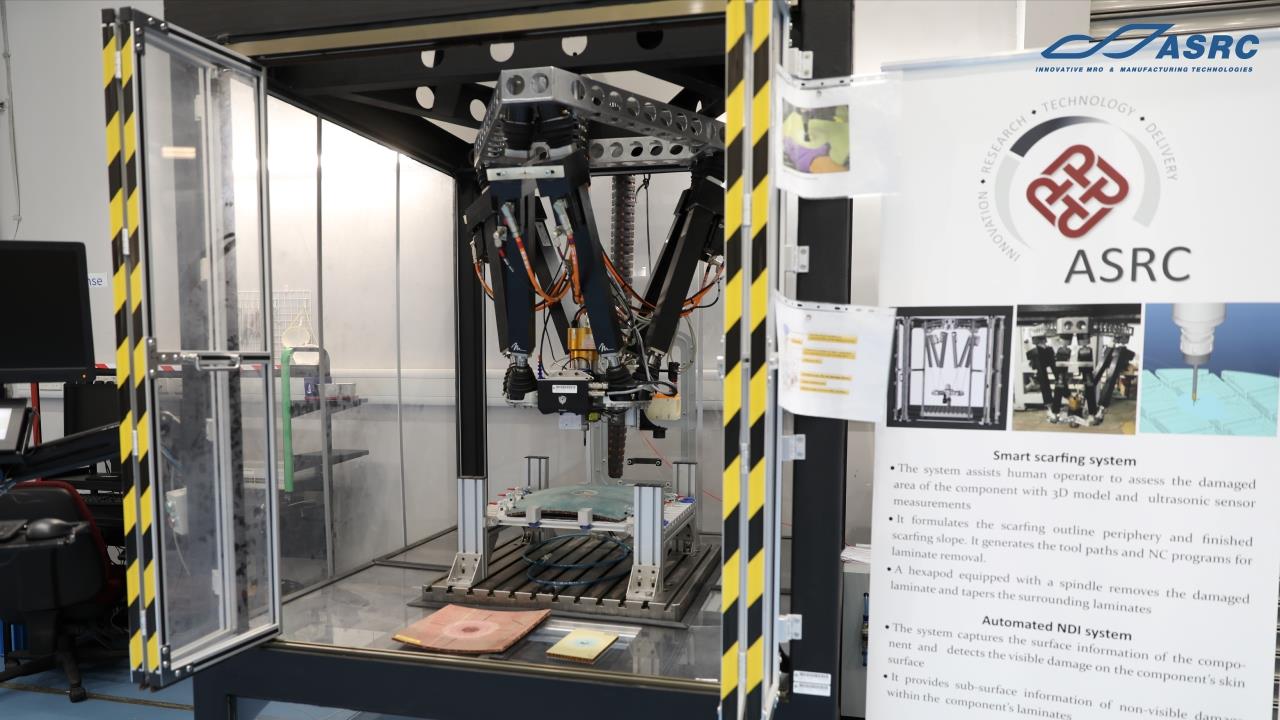
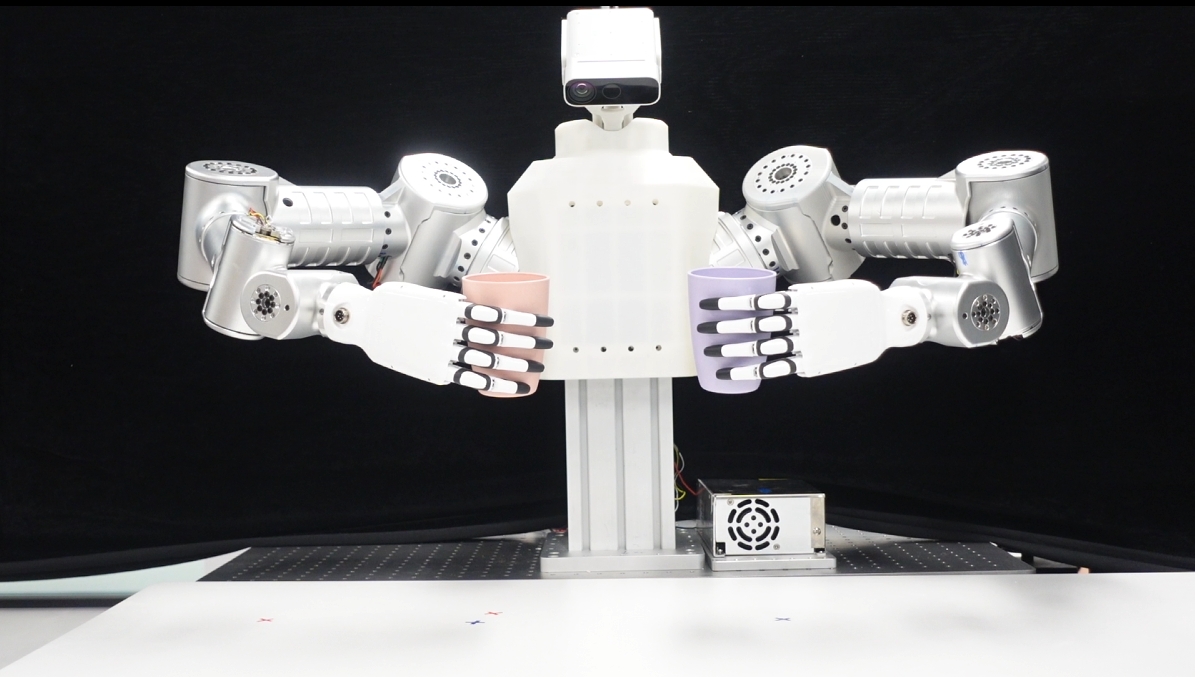
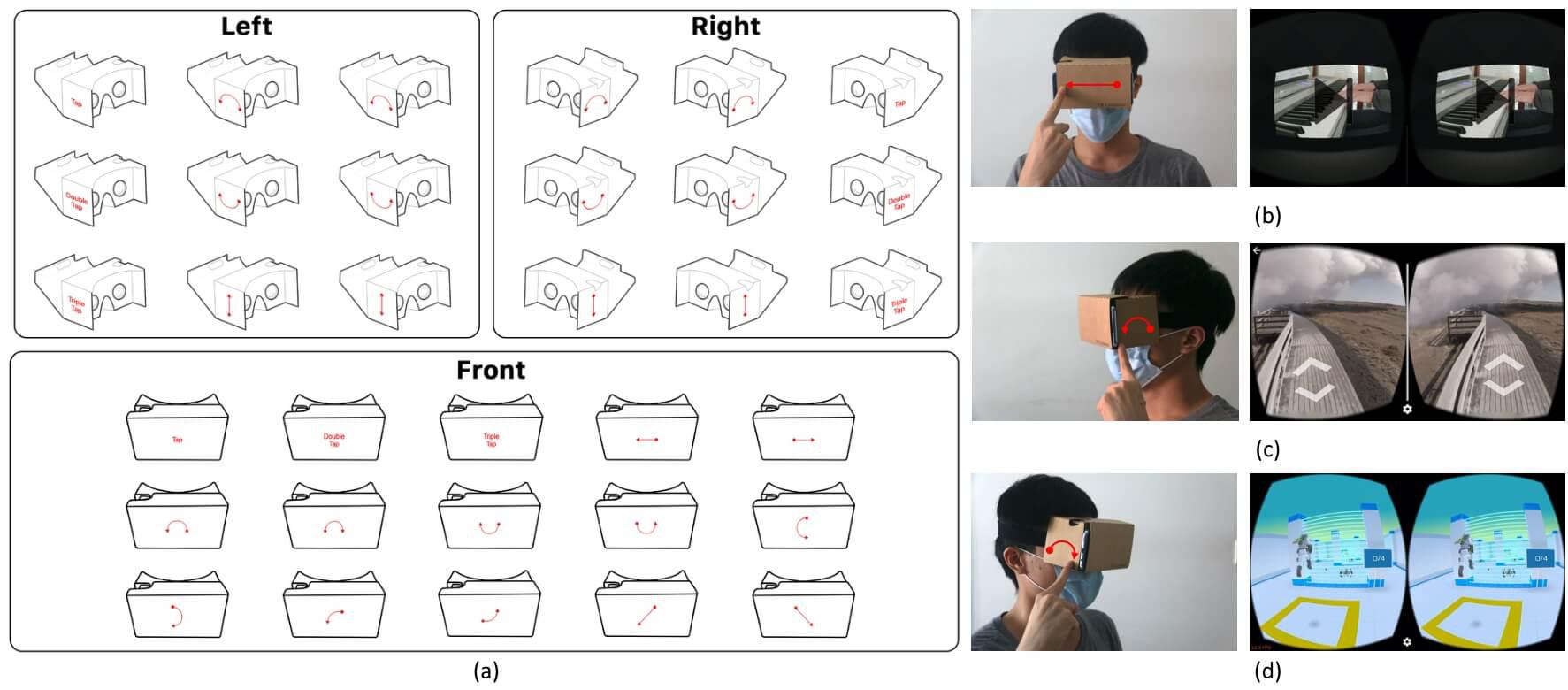
香港中文大学与美国加州大学柏克莱分校及多间物流业机构合作,携手成立香港物流机械人研究中心,旨在研发专为物流业者重塑「未来工作空间」的先进科技。中心将进行四项与物流业相关的机械人技术研究计划,分别为:
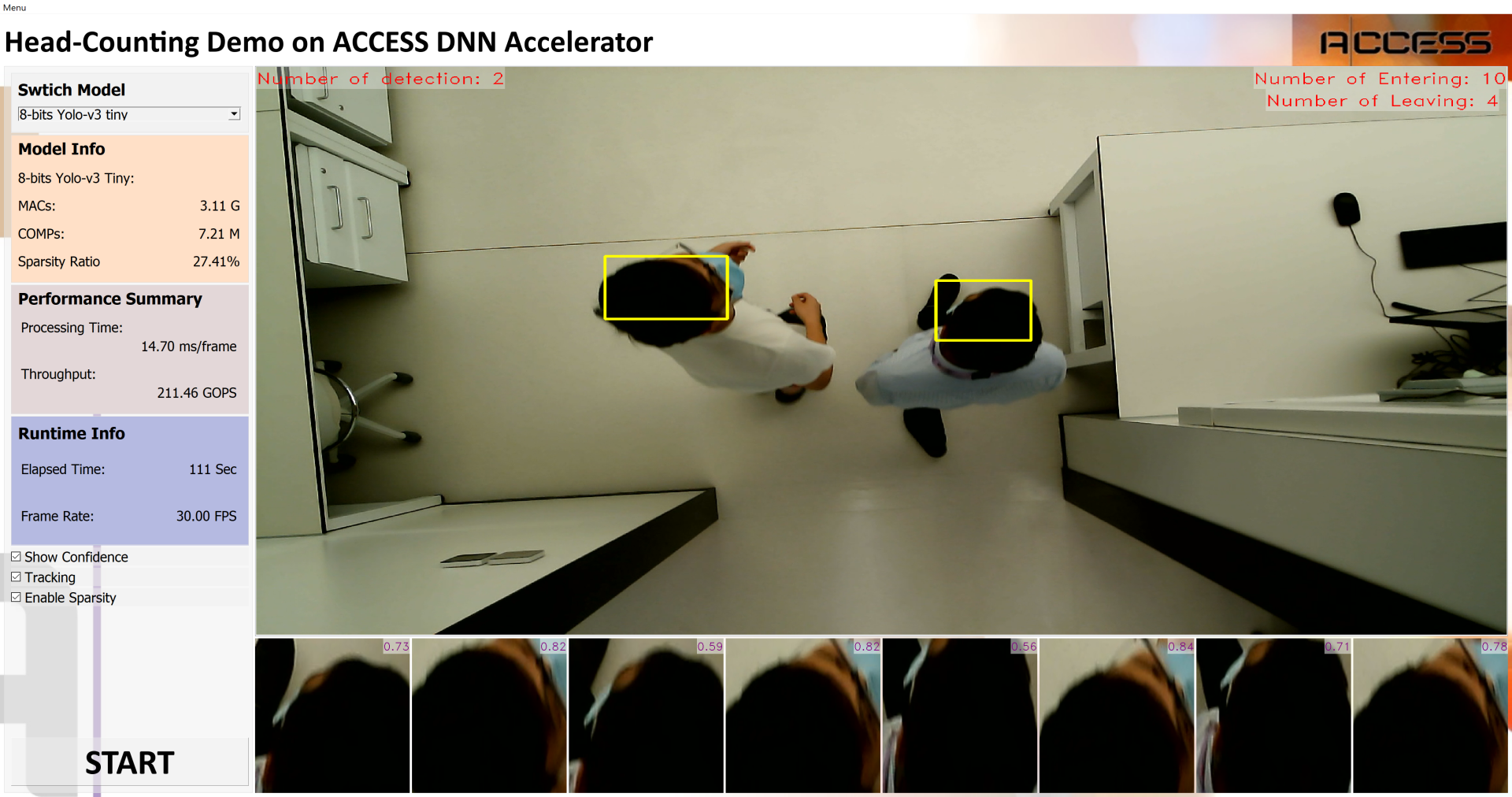
• 机器人感知/p>
• 人工智能驱动机器人操作
• 人机协作
• 无人驾驶物流系统
研究成果以应用于多个物流业领域为目标,当中包括机场自动化、仓库自动化、货柜码头自动化、自动运送及自驾物流货车。中心旨在促进人工智能及机械人技术之转化研究,有助打造香港在物流用机械人技术领域上成为领先者 ,并鼓励科技初创企业开发机械人知识产权及切实可行的商用方案。此外,中心亦会积极为大学毕业生、博士后研究员及工程师提供训练,培育人才。
查询