Image-based Automation in Robotic Surgery

Overview
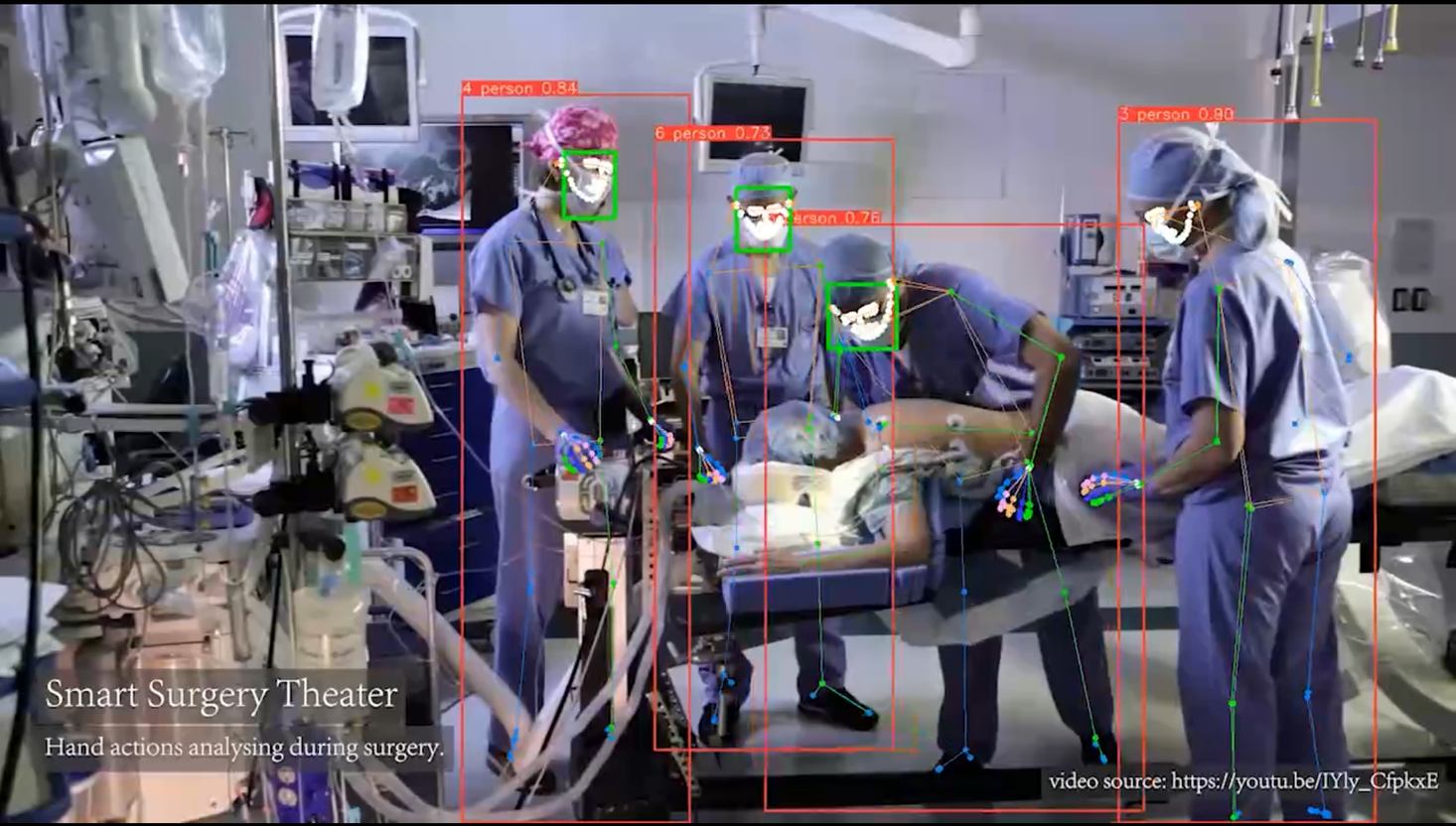
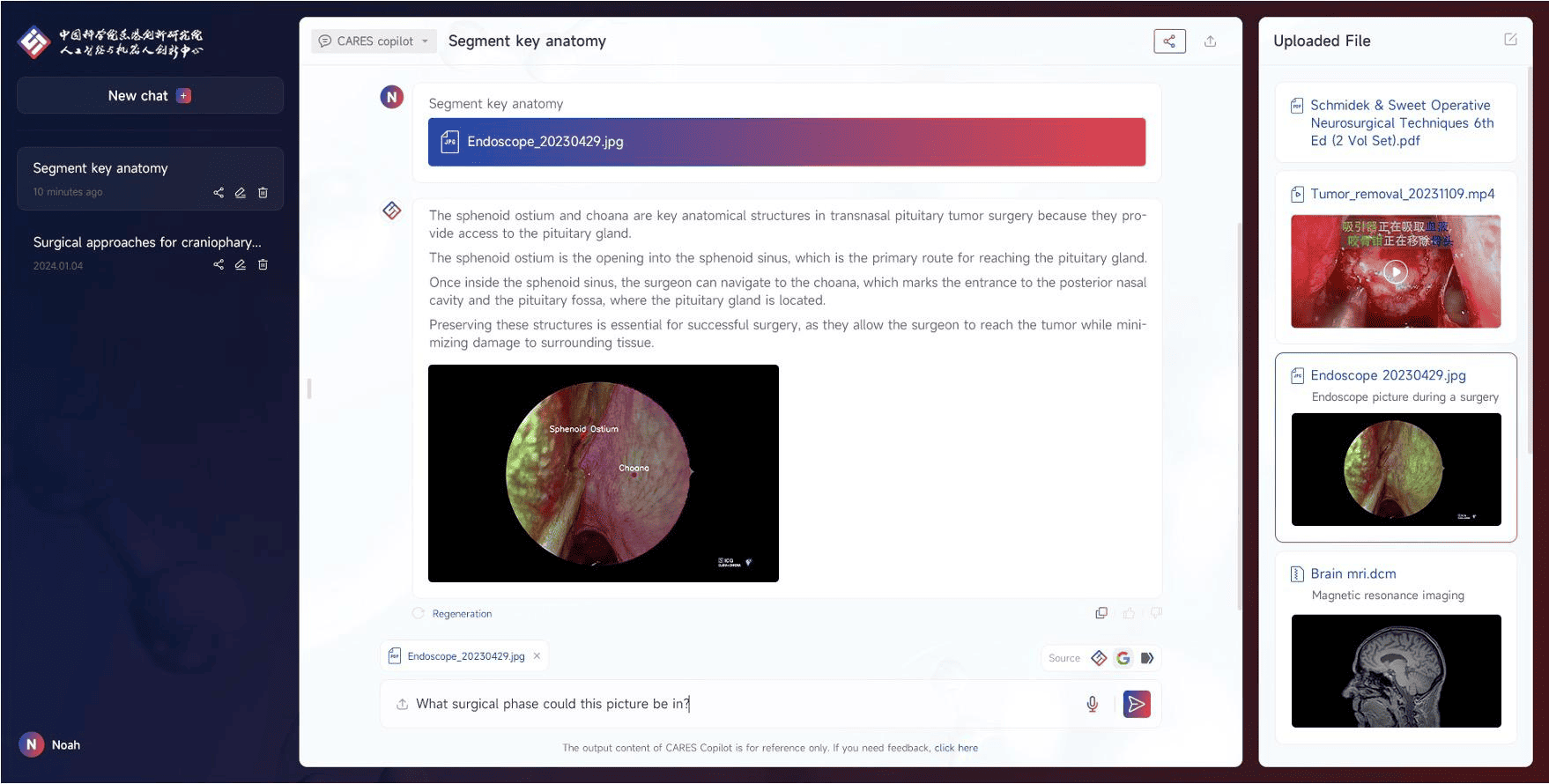
Existing surgical robots often work in a remote control mode in which a surgeon tele-controls the robots with full attention. It is widely considered that such remote-controlled robots will be replaced by next-generation ones that will assist surgeons with higher-level intelligence, and/or automatically perform particular steps of surgical procedures.
Problem addressed
The development of intelligent surgical robots presents several big scientific challenges including how to efficiently and reliably sense surgical objects/fields; how to automatically carry out pre-operative (pre-op) surgical planning and navigate the robots in the highly dynamic and individual-dependent environment; how to control the actions of surgical robots safely and accurately; and how to equip surgical robots with high-level intelligence.
Innovation
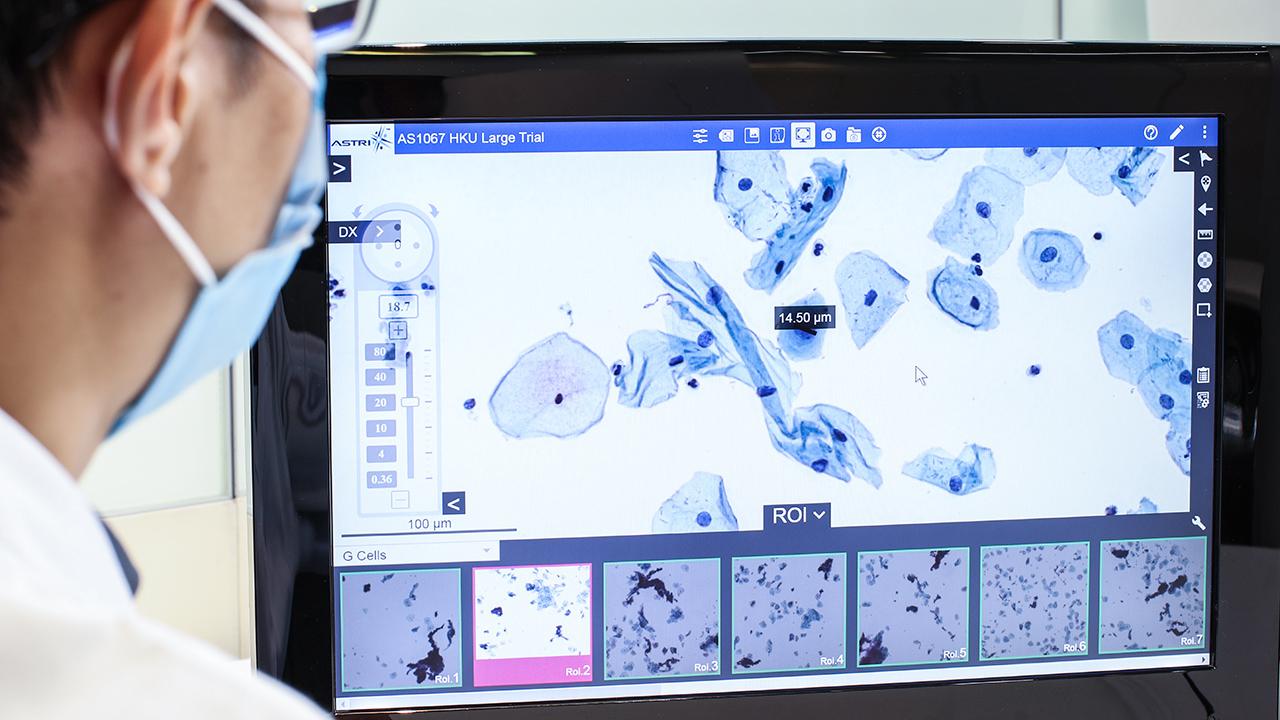
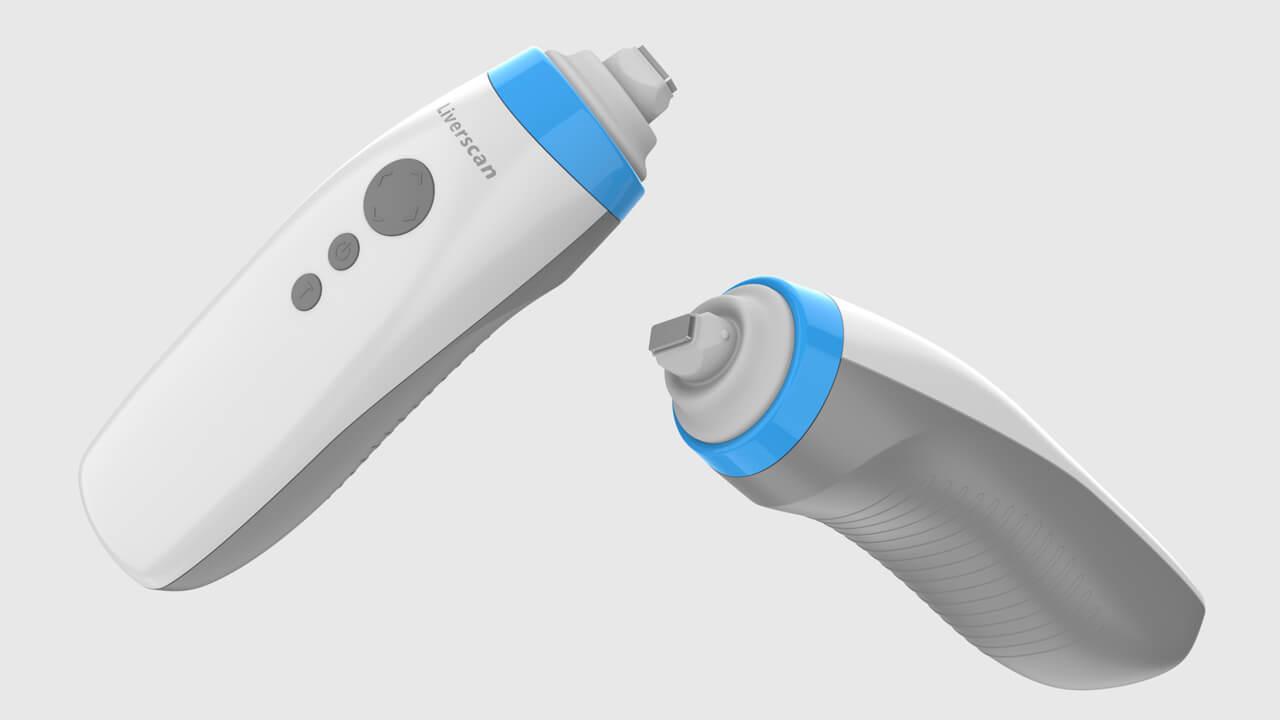
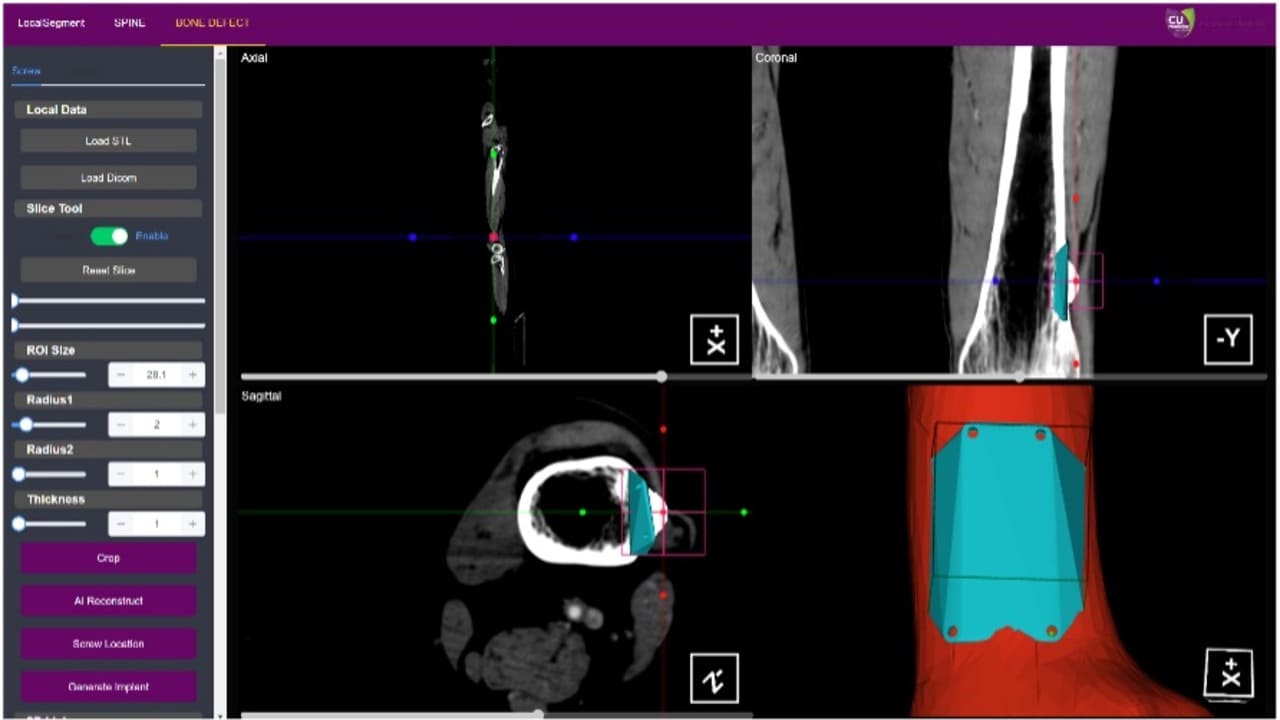
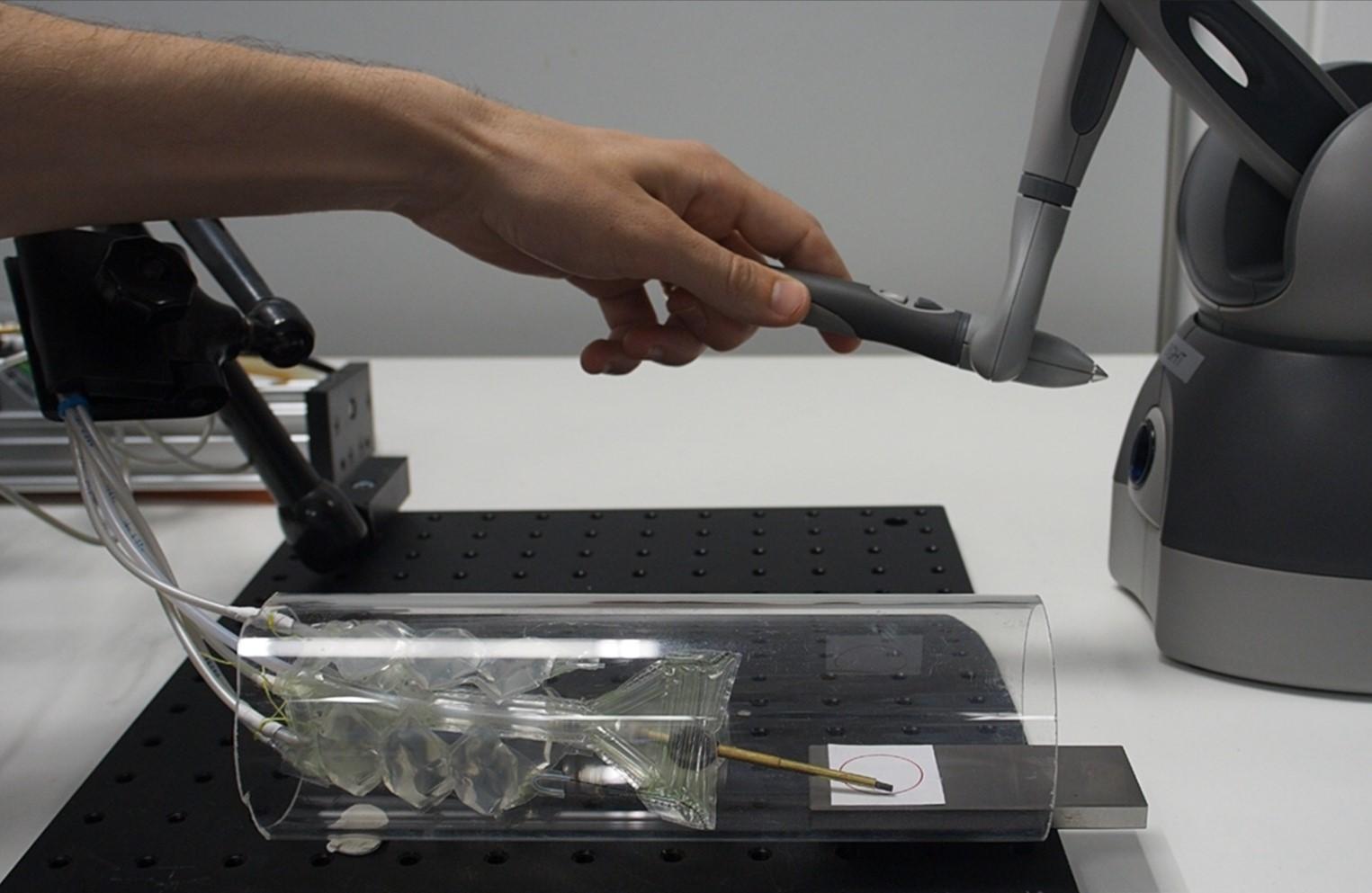
- Novel systems and algorithms for real-time sensing of 3D geometry, force, and biomechanical properties of surgical objects
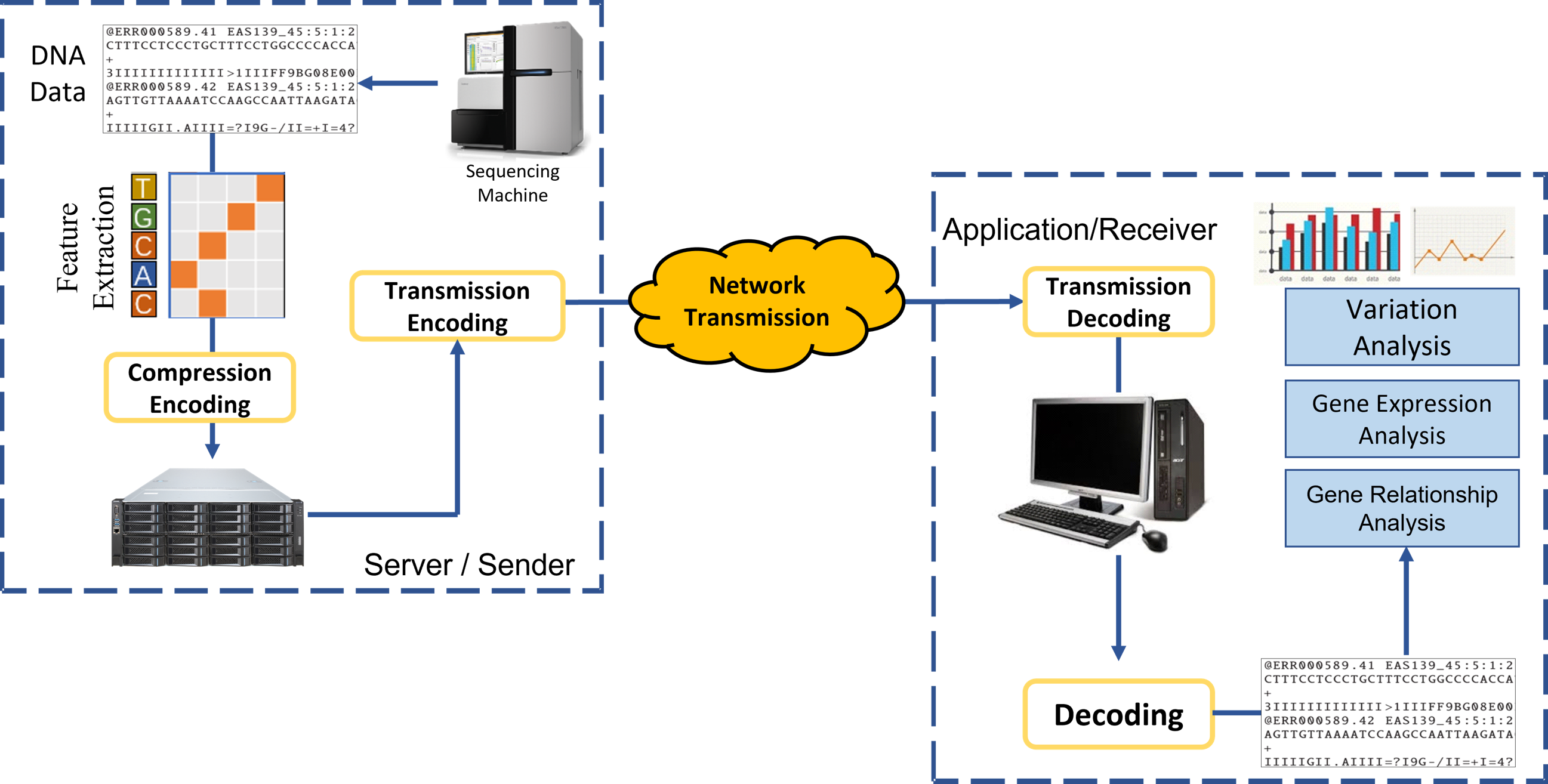
- Data-driven surgical planning and navigation by using the huge image data of robotic surgery
- Visually servoed controllers for robots interacting with soft tissues; and robotic surgery intelligence based on deep learning
Key impact
- Enhance real-time perception of complex surgical environment for precise soft-tissue manipulation in minimally invasive interventions
- Promote more informed surgical decision-makings based on comprehensive computation and analysis of multi-modal patient data
- Elevate the level of autonomy with control policy learning for specific actions with surgical robots
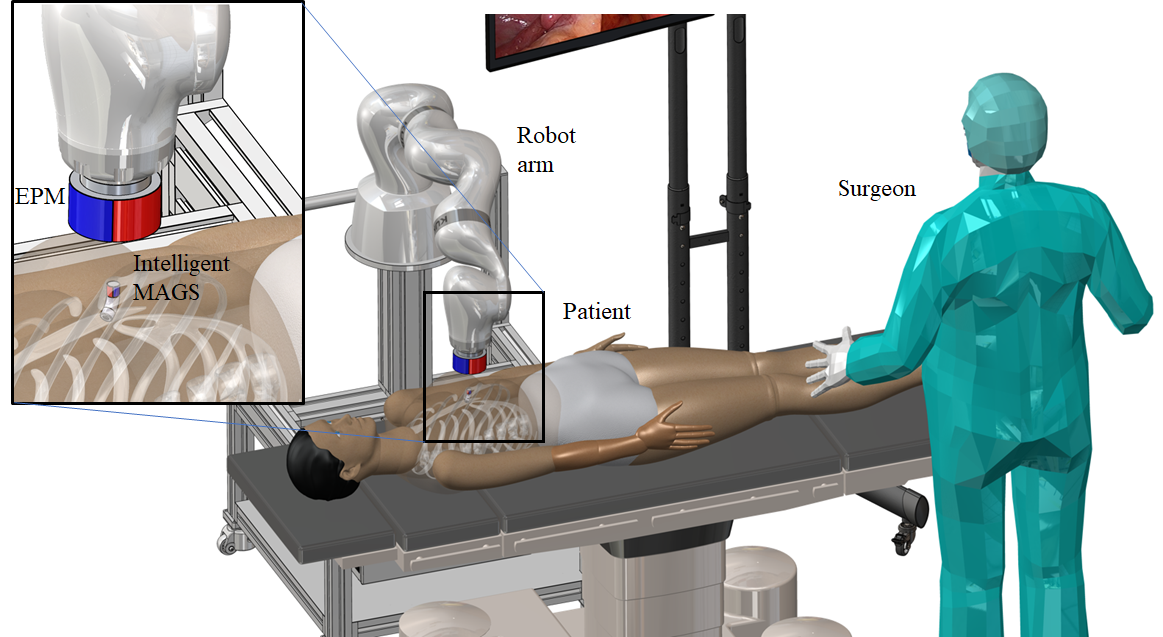
- The technologies are integrated into a prototype of image-guided surgical robots that is able to automatically assist surgeons and/or perform a single surgical step or several connected steps of surgical procedures
Award
- IEEE International Conference on Robotics and Automation (ICRA 2021) Best Paper Award in Medical Robotics
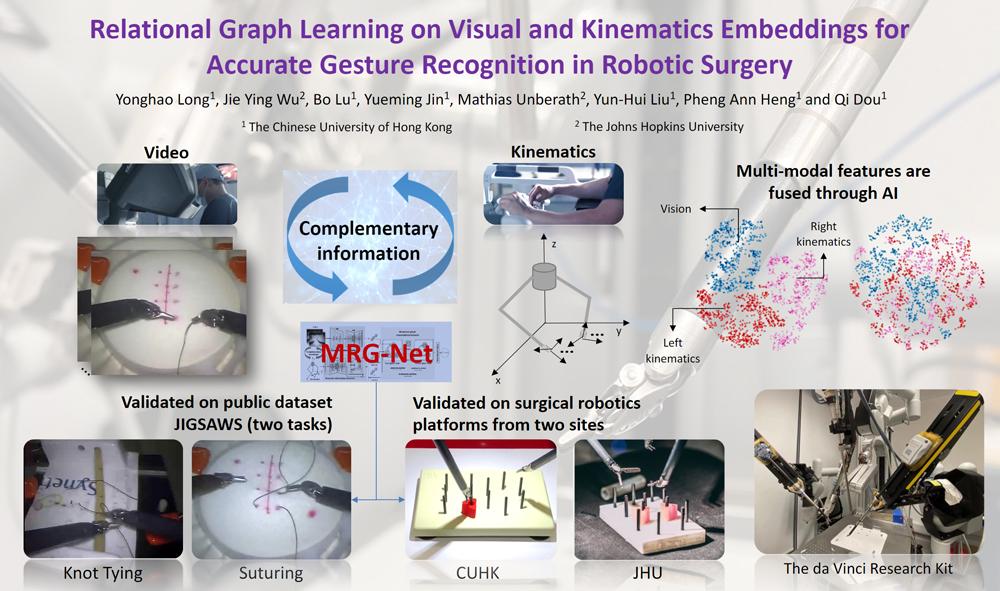
- International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI 2022) Young Scientist Publication Award
Application
- Robotic surgery
Through the InnoHK funding support of the HKSAR Government, the Multi-Scale Medical Robotics Center (MRC) was established in 2020 by the Chinese University of Hong Kong in collaboration with ETH Zürich, Imperial College London, Johns Hopkins University, and the University of Hong Kong. We bring the worlds of medicine and robotics together, focusing on technological innovation with a strong emphasis on clinical translation and direct patient benefits.
Furthermore, we support three areas of research including: Endoluminal multi-scale robotic platforms for diagnostics and therapeutics, Magnetic-guided endoluminal robotic platform, Image-guided robotic interventions.
Enquiry