Magnetic Anchored and Guided Endoscope (MAGS) for Single Incision Surgery

Overview
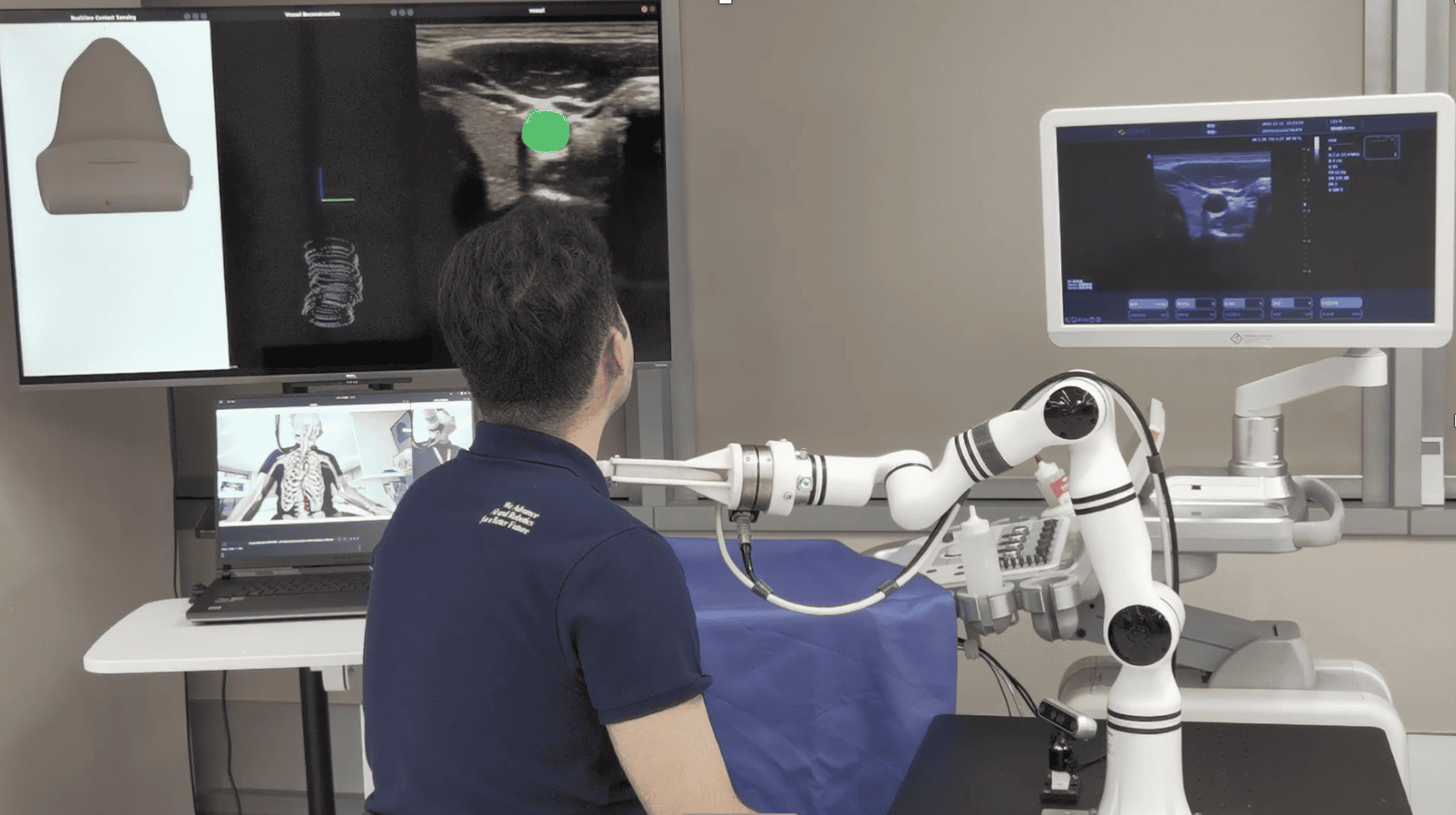
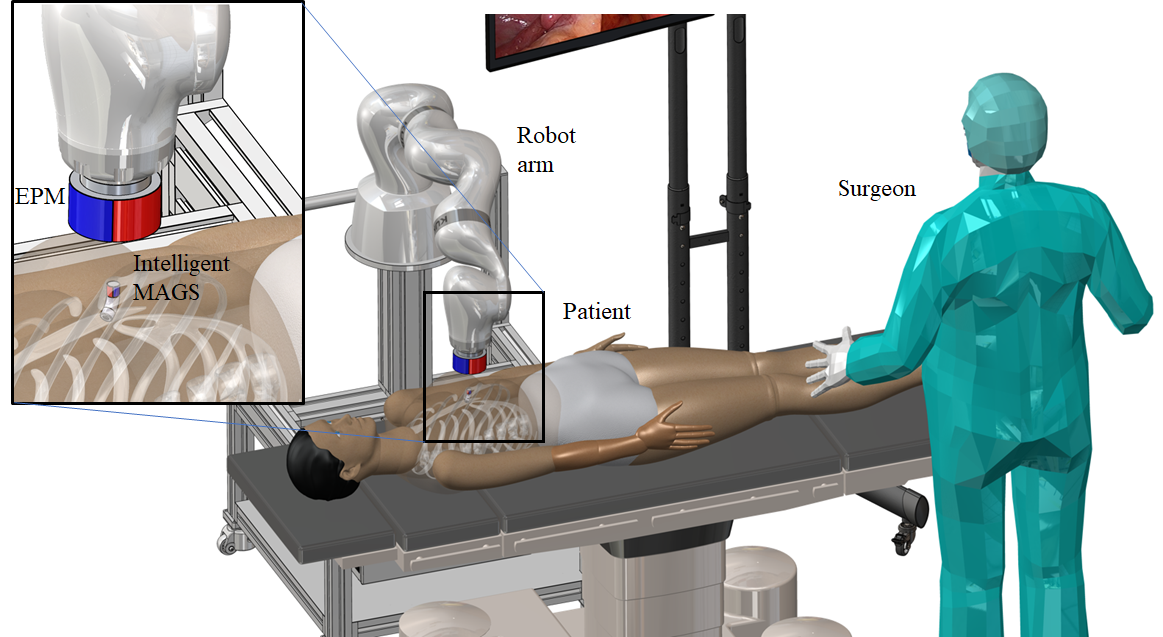
Leveraging magnetic linkage to replace the physical connection laparoscopes, MAGS reduces patient’s trauma by removing the incision port required by conventional endoscopes in minimally invasive surgery. It enables a smoother surgical procedure by preventing instrument collisions. Multiple endoscopes can also be deployed simultaneously to offer multi-view of surgical targets.
Technical name of innovation
Magnetic Anchored and Guided Endoscope
Research completion
-
Commercialisation opportunities
-
Problem addressed
Conventional laparoscopes are not suitable for single port surgery as they limit the surgeon's field of view and may collide with other instruments. They also occupy much port space and hence bigger incisions or additional port is required.
Innovation
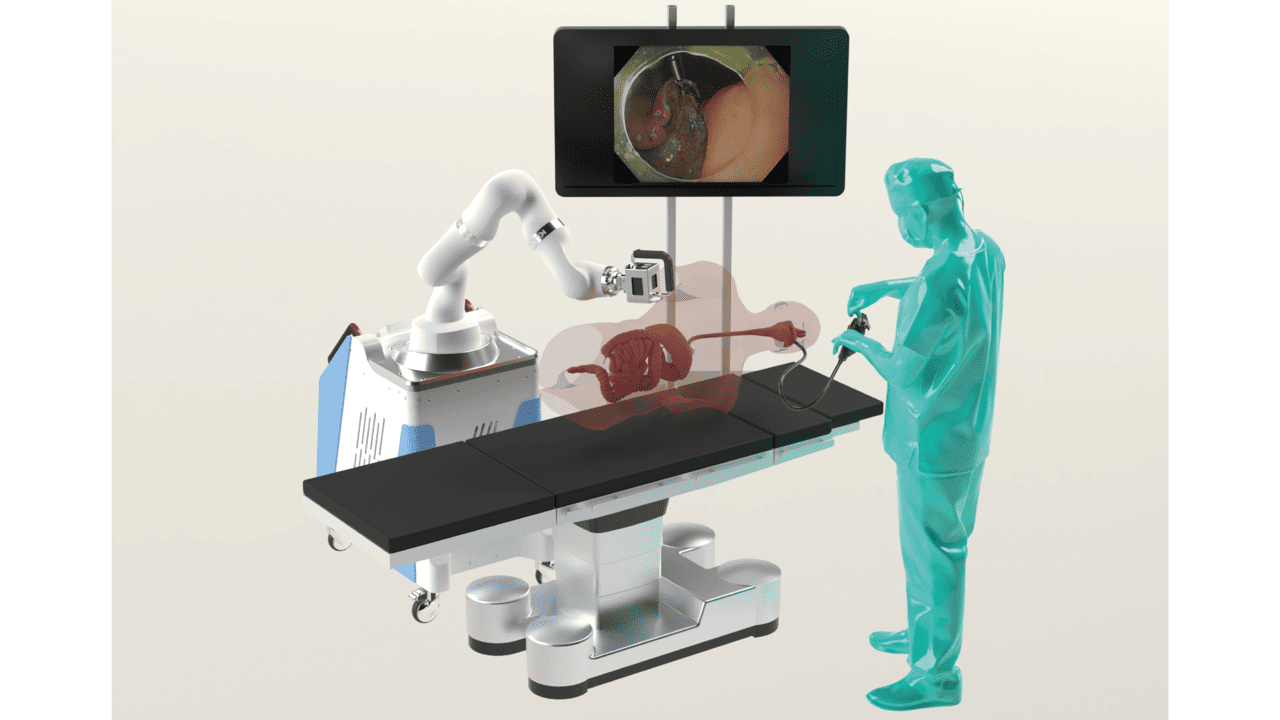
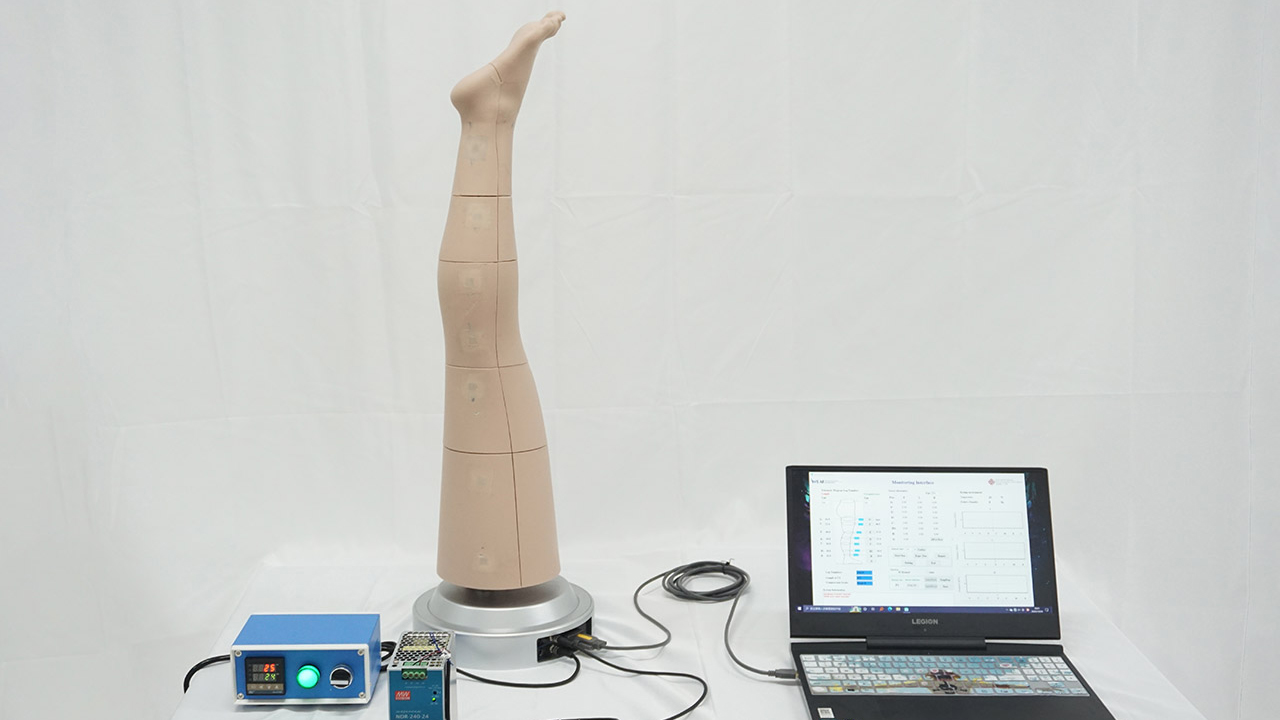
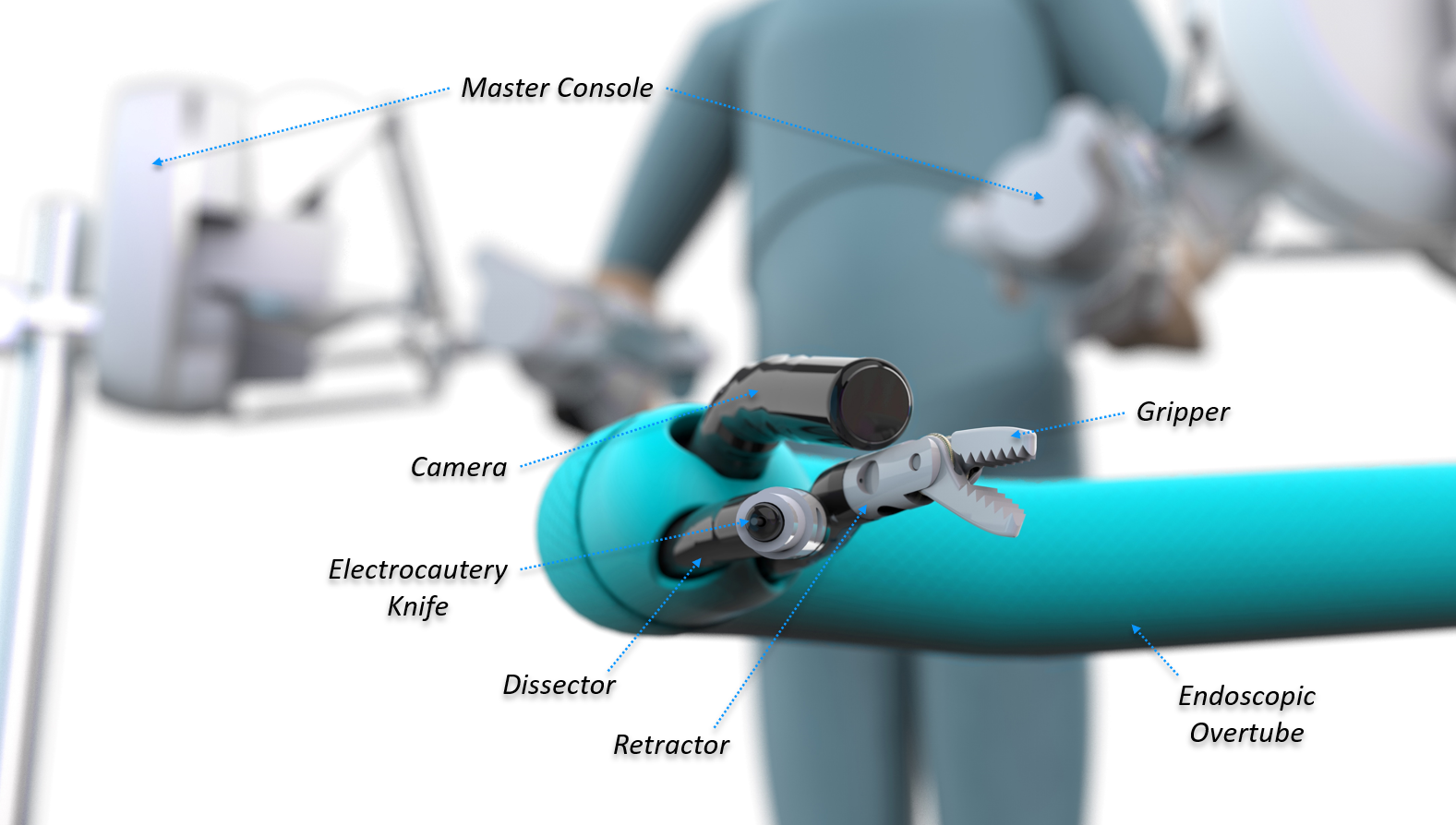
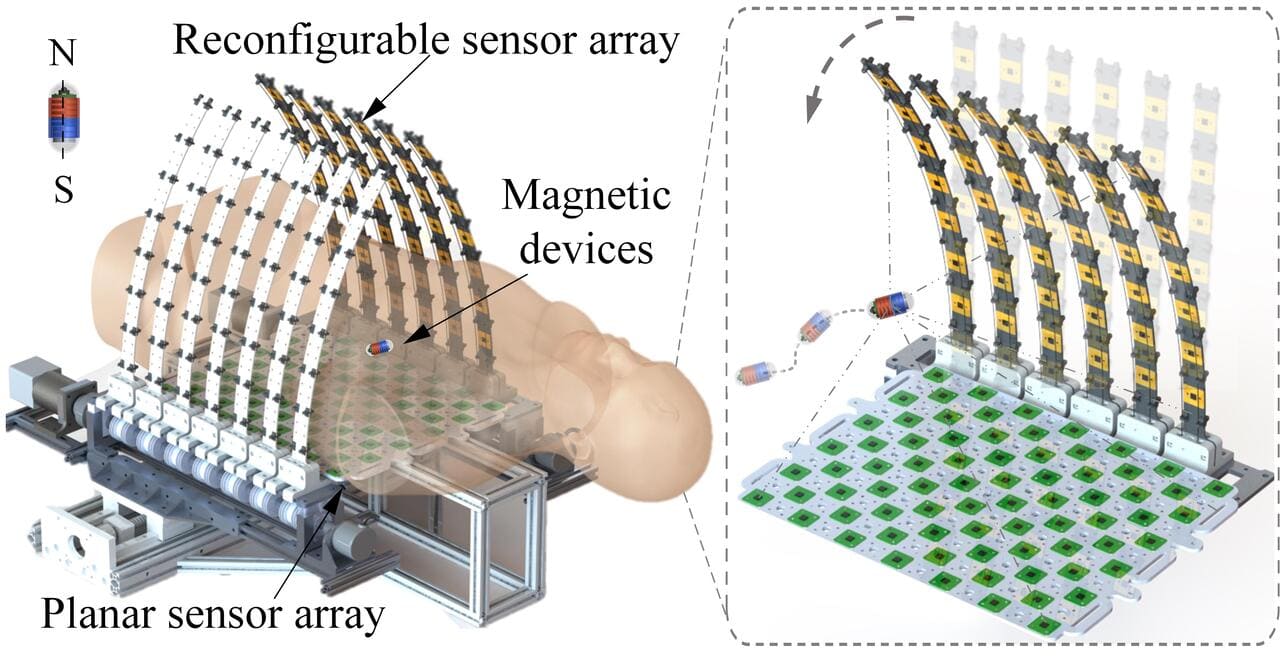
- The intelligent magnetic anchored and guided endoscope system includes a robot controller and a magnetic anchored endoscope.
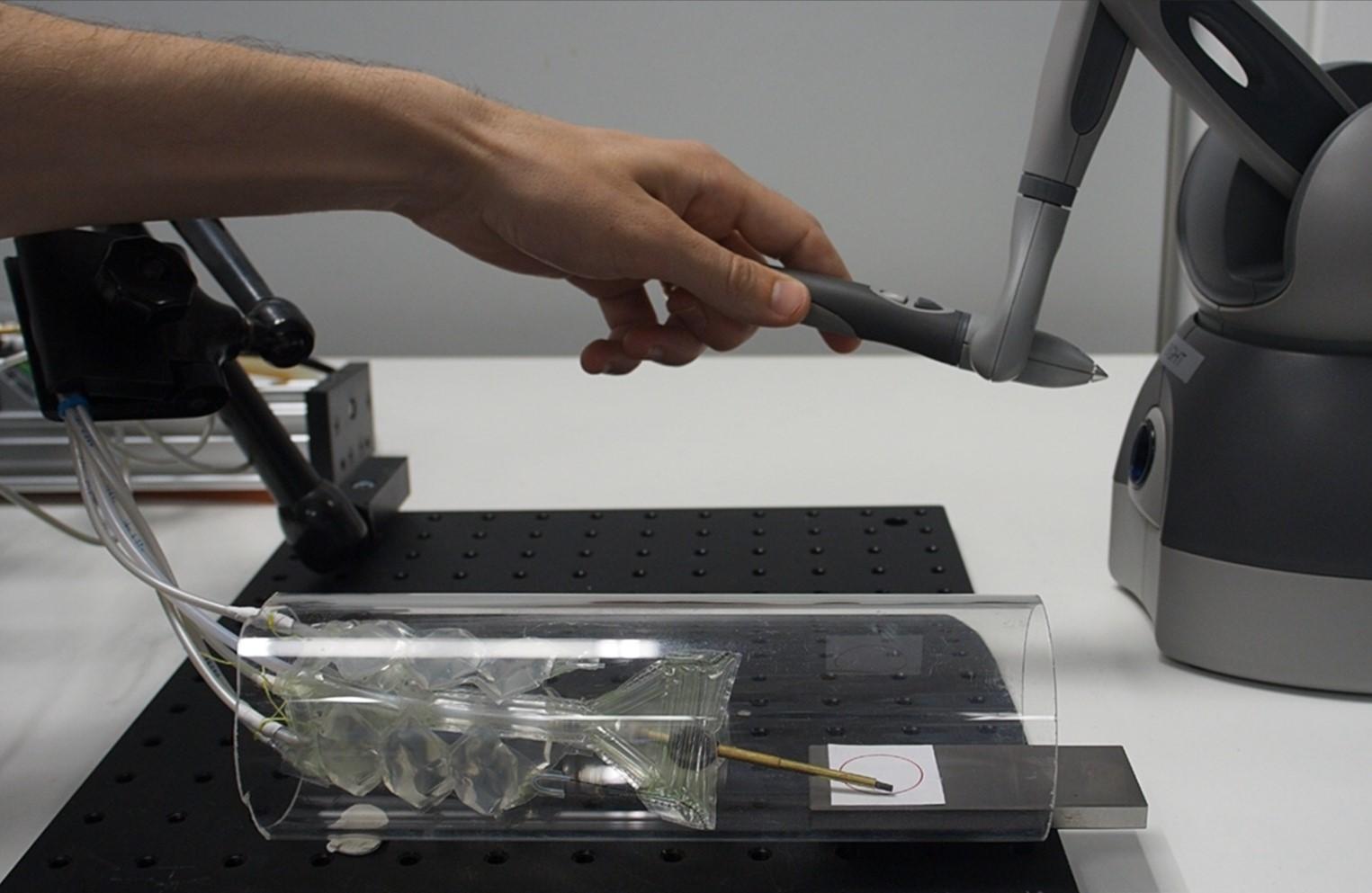
- The robot arm controls an external magnet above the patient's chest. The magnetic force guides the endoscope just beneath the chest wall, providing multiple perspectives for surgeons.
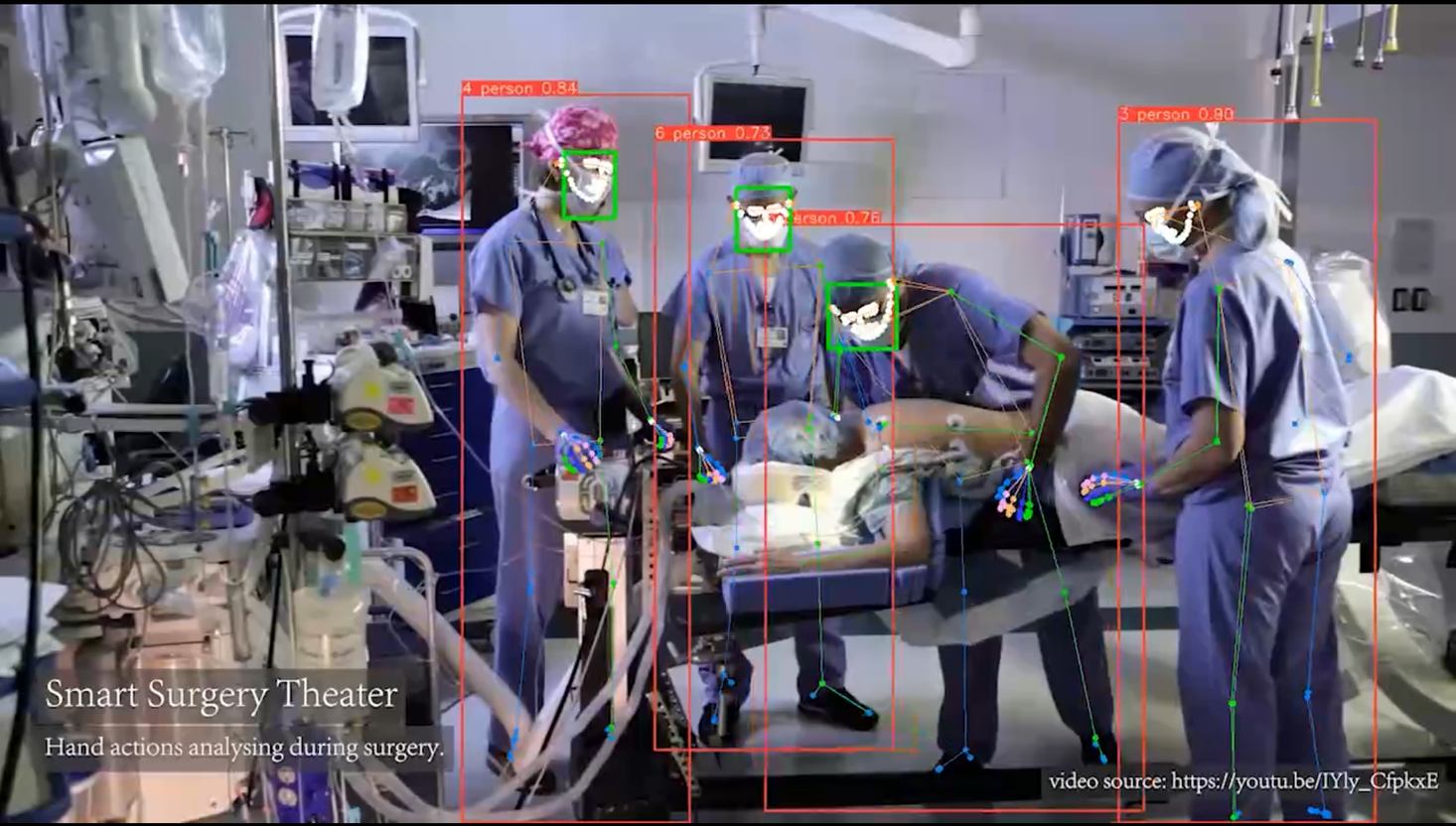
- A.I. assisted instrument detection is paired with the robot controller, which allows the system to track the surgeon's tools autonomously, so surgeons can work intuitively without worries of endoscope control.
Key impact
- Magnetic anchored endoscope has more freedom inside patient and offer better views for surgeons.
- The endoscope can be inserted without occupying the access port, which is ideal for single port surgery.
- Because the endoscope is located just beneath the chest wall, away from other instruments, collisions can be prevented.
- This system offers autonomous instrument detection and tracking, thus overcoming the limitations such as inaccuracy and fatigues of manually controlled devices.
Award
- Best papre in robotics in IEEE ROBIO 2022
- Bronze Medal in the International Exhibition of Invention of Geneva 2021
- Gold Award in EMedic Global 2019
Application
- Single port approach for video assisted thoracoscopic surgery (VATS)
Patent
- US 2019/0159668 A1
- CN 108778092A
Through the InnoHK funding support of the HKSAR Government, the Multi-Scale Medical Robotics Center (MRC) was established in 2020 by the Chinese University of Hong Kong in collaboration with ETH Zürich, Imperial College London, Johns Hopkins University, and the University of Hong Kong. We bring the worlds of medicine and robotics together, focusing on technological innovation with a strong emphasis on clinical translation and direct patient benefits.
Furthermore, we support three areas of research including: Endoluminal multi-scale robotic platforms for diagnostics and therapeutics, Magnetic-guided endoluminal robotic platform, Image-guided robotic interventions.
Enquiry
























![Long COVID Test: [Non-Invasive Stool Test to detect distinct gut microbiome profile associated with “Long COVID”]](/uploads/image/202304/6802a81a4ec6afc2ac97f3912ec9a7f4.jpg)