High Performance Robotic Systems for Intraoperative MRI-guided Interventions

Overview
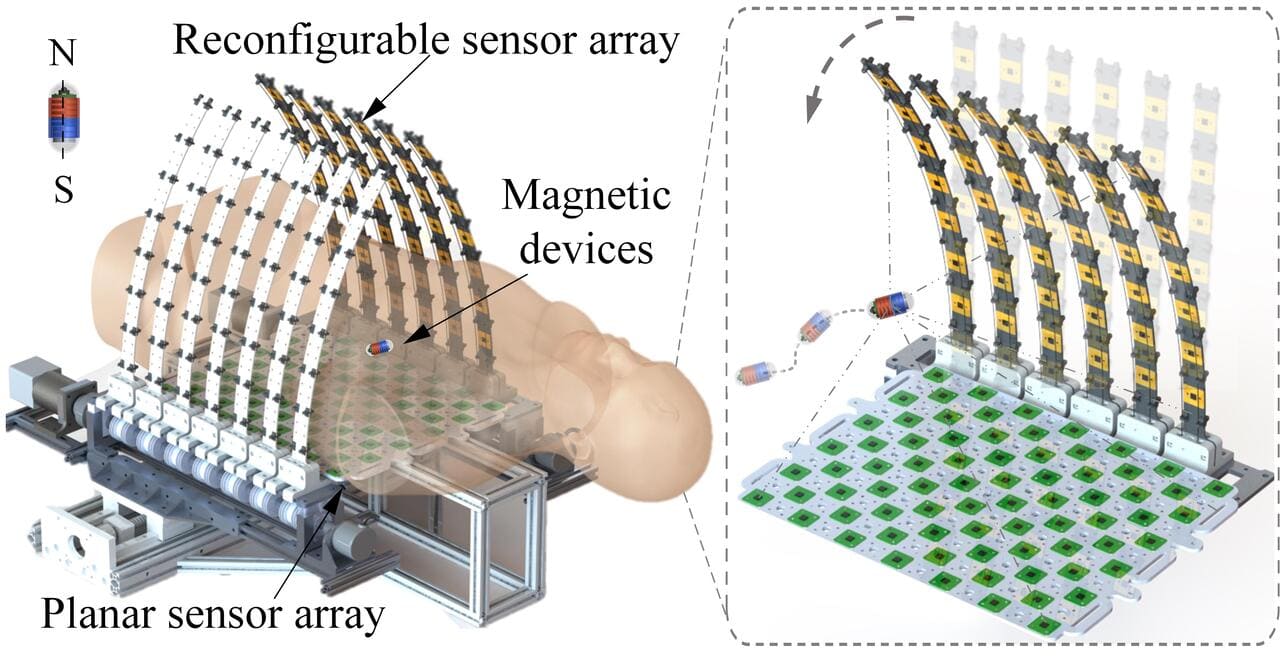
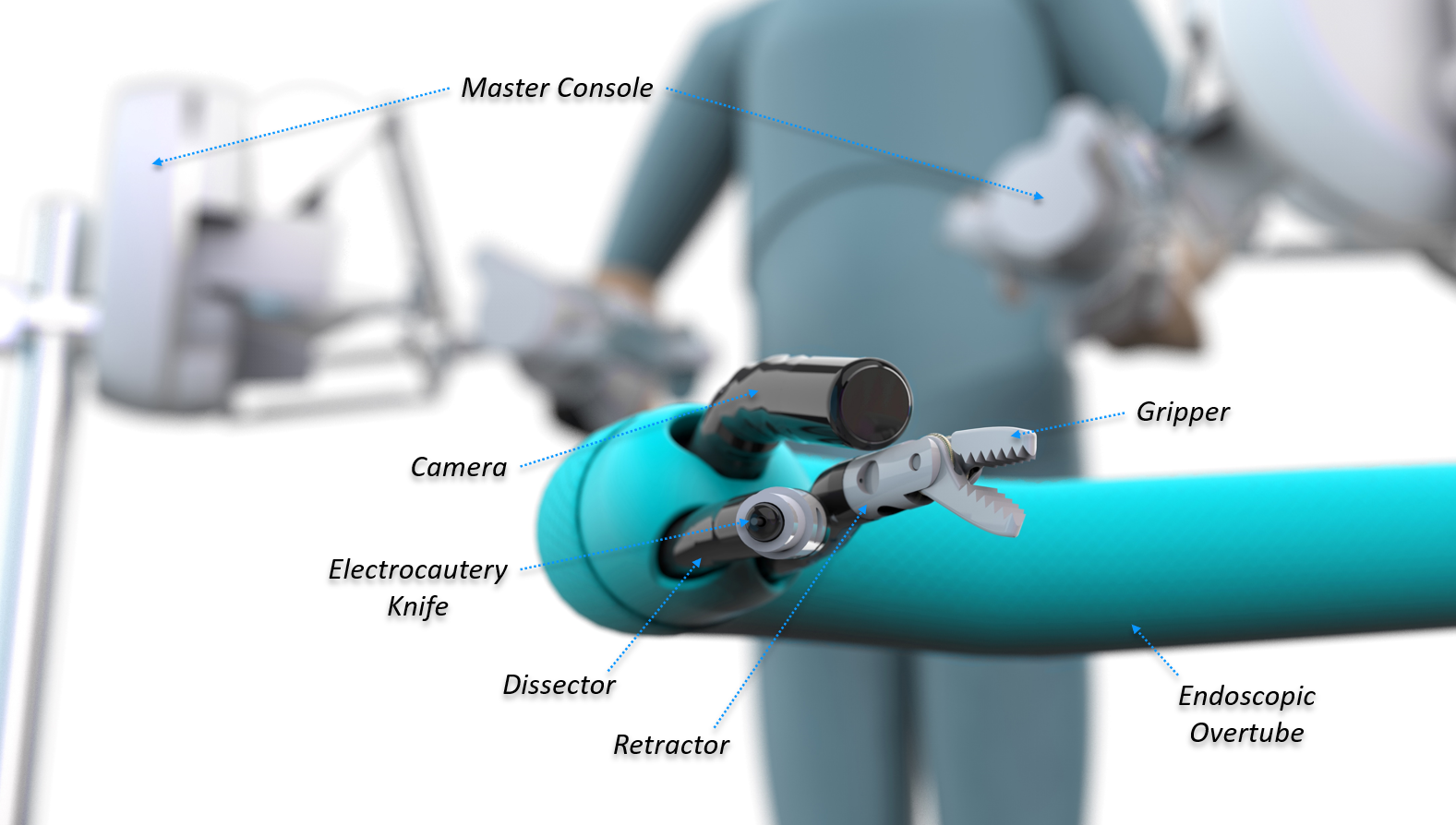
Advanced surgical robotics has attracted significant research interest in supporting image guidance, even magnetic resonance imaging (MRI) for effective navigation of surgical instruments, taking advantage of the high soft-tissue contrast and zero ionizing radiation. The ultimate research objective is to enable safe, precise and effective control of robotics instruments with the aid of pre- and intra-op MRI models.

Technical name of innovation
Intra-operative MRI-guided robot
Problem addressed
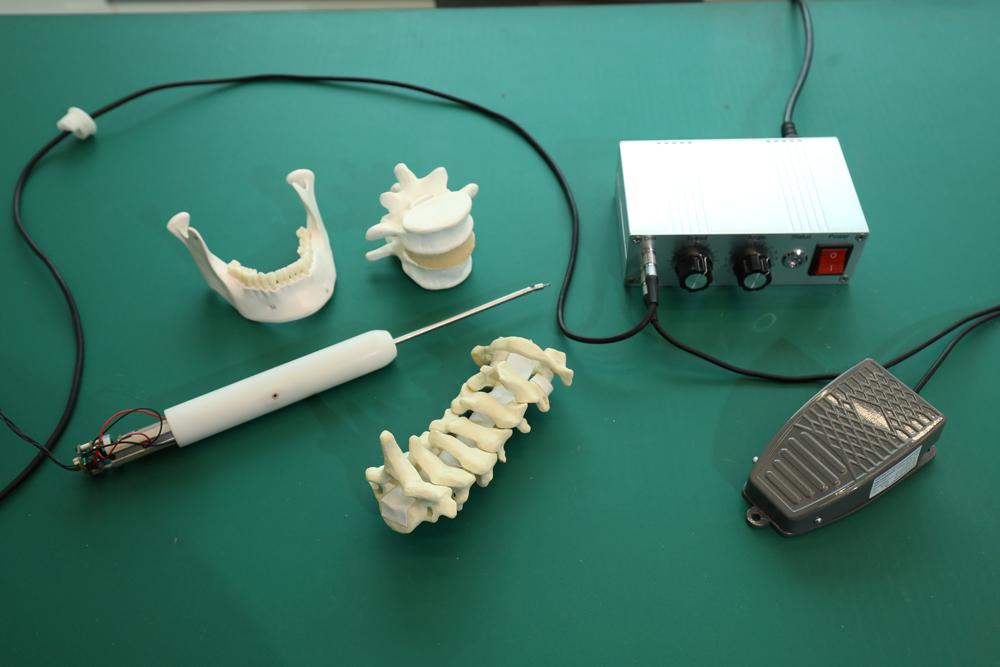
We have solved the fundamental challenge strong magnetic field in MRI environment with hydraulic-driven actuation. We have then developed comprehensive set of tools covering intra-op MR image processing, MR-safe robot sensing, positional tracking, navigation and actuation All of these working towards an ultimate goal for streamlining the effective surgical flow for MRI-guided interventions.
Innovation
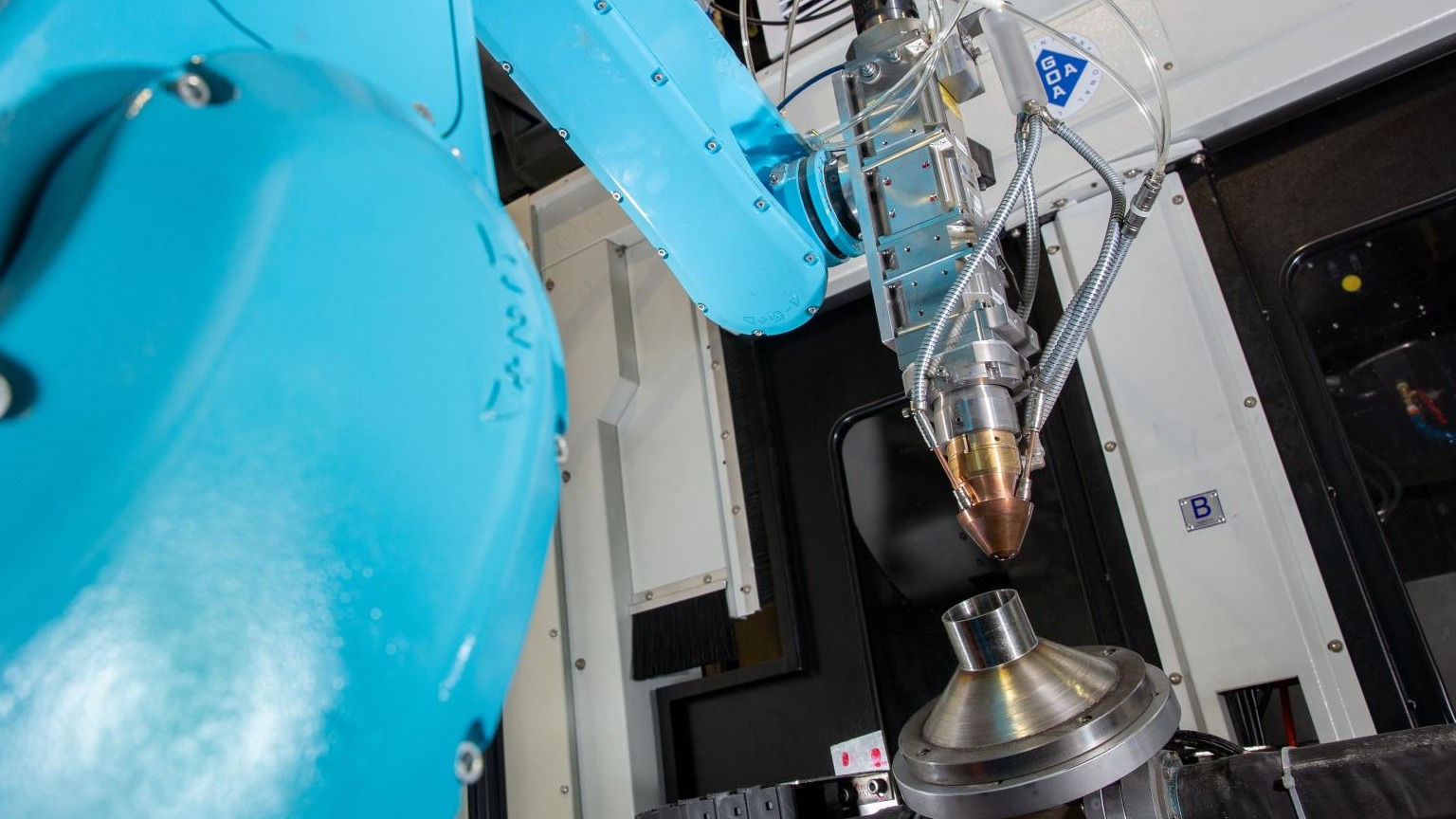
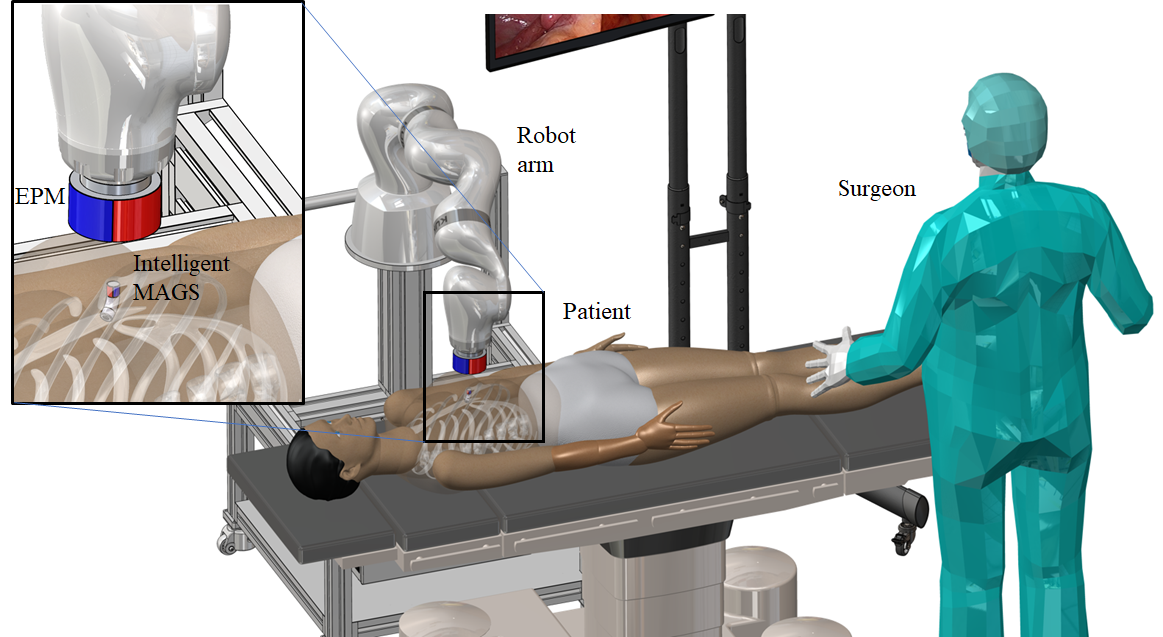
- Compact design for operation within the MRI bore and even the body/head coil
- Magnetic resonance (MR)-compatible actuation that could remotely-operate the robot in sufficient degrees-of-freedom (DoFs)
- MR-based tracking system localizing the surgical instruments relative the MR image coordinates
Key impact
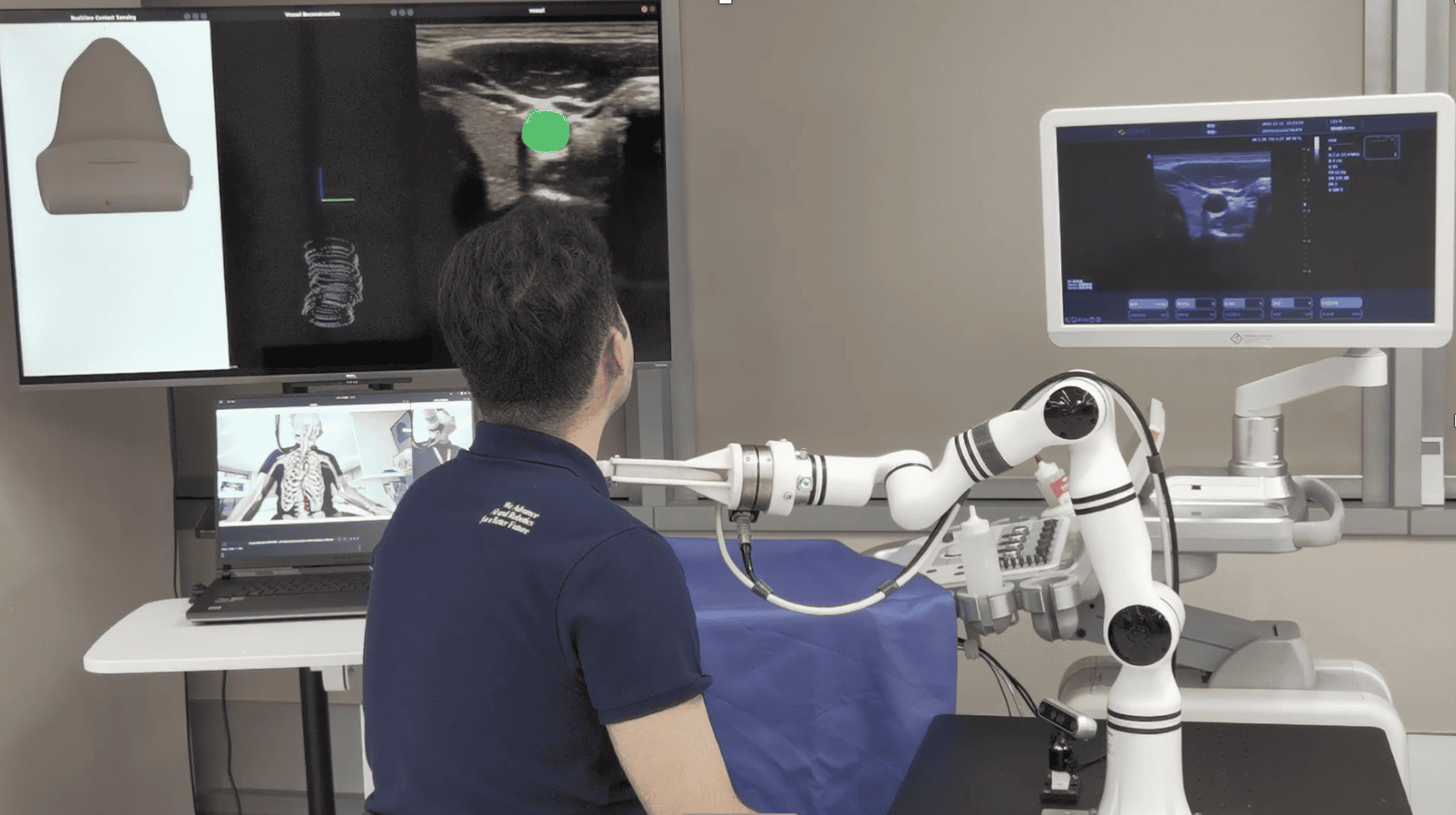
- Real-time processing the co-registration of the surgical plan with the imaging data captured during the intervention, as well as real-time localization of the instrument relative to the anatomy of surgical interest
- Clinical potential of enhanced surgical safety by imposing high-fidelity imaging/sensing feedback on remotely-operated robotic instruments even under large-scale and rapid tissue deformations in soft tissue surgeries
Application
- Stereotactic neurosurgery
- Lumbar spinal injection
Through the InnoHK funding support of the HKSAR Government, the Multi-Scale Medical Robotics Center (MRC) was established in 2020 by the Chinese University of Hong Kong in collaboration with ETH Zürich, Imperial College London, Johns Hopkins University, and the University of Hong Kong. We bring the worlds of medicine and robotics together, focusing on technological innovation with a strong emphasis on clinical translation and direct patient benefits.
Furthermore, we support three areas of research including: Endoluminal multi-scale robotic platforms for diagnostics and therapeutics, Magnetic-guided endoluminal robotic platform, Image-guided robotic interventions.
Enquiry




















![Long COVID Test: [Non-Invasive Stool Test to detect distinct gut microbiome profile associated with “Long COVID”]](/uploads/image/202304/6802a81a4ec6afc2ac97f3912ec9a7f4.jpg)