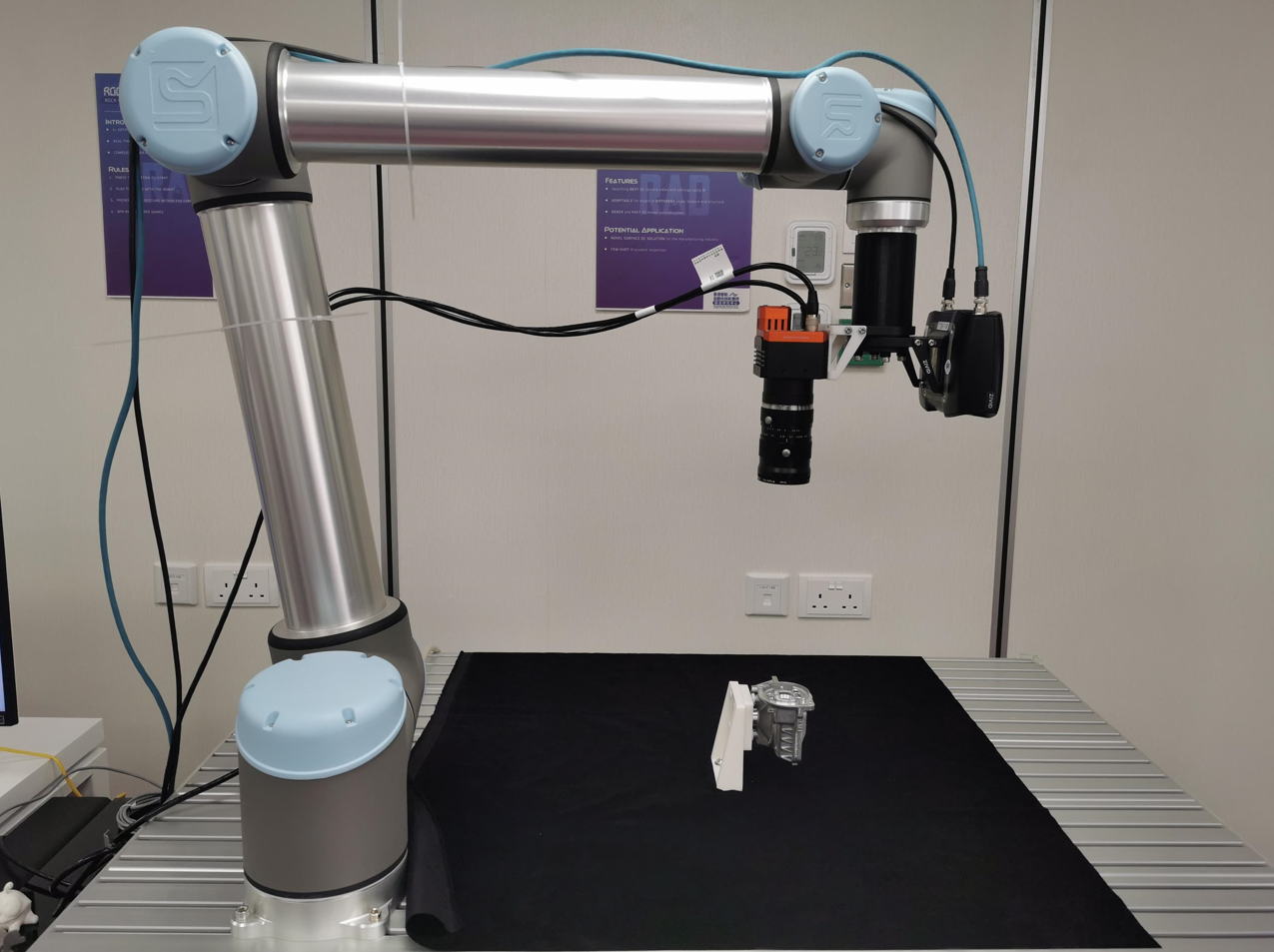
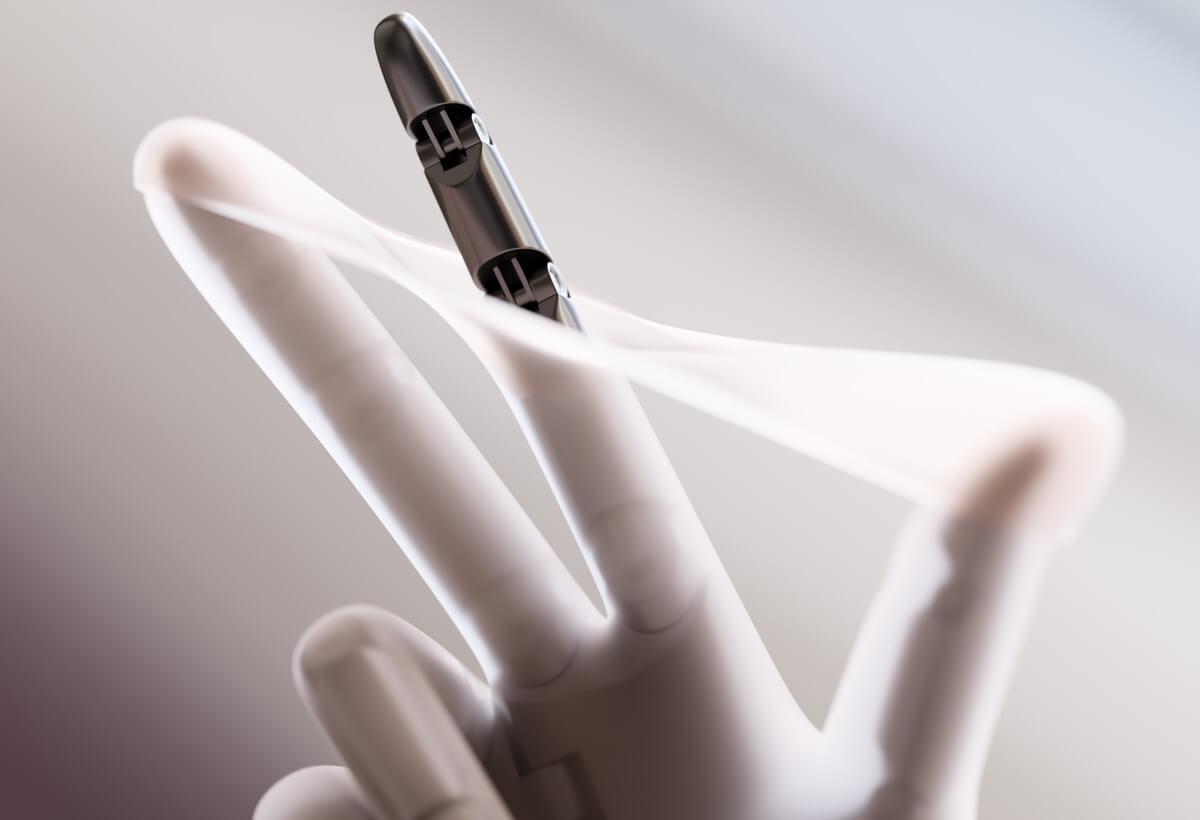
可靈活抓取物品的混合結構柔性機械爪

簡介
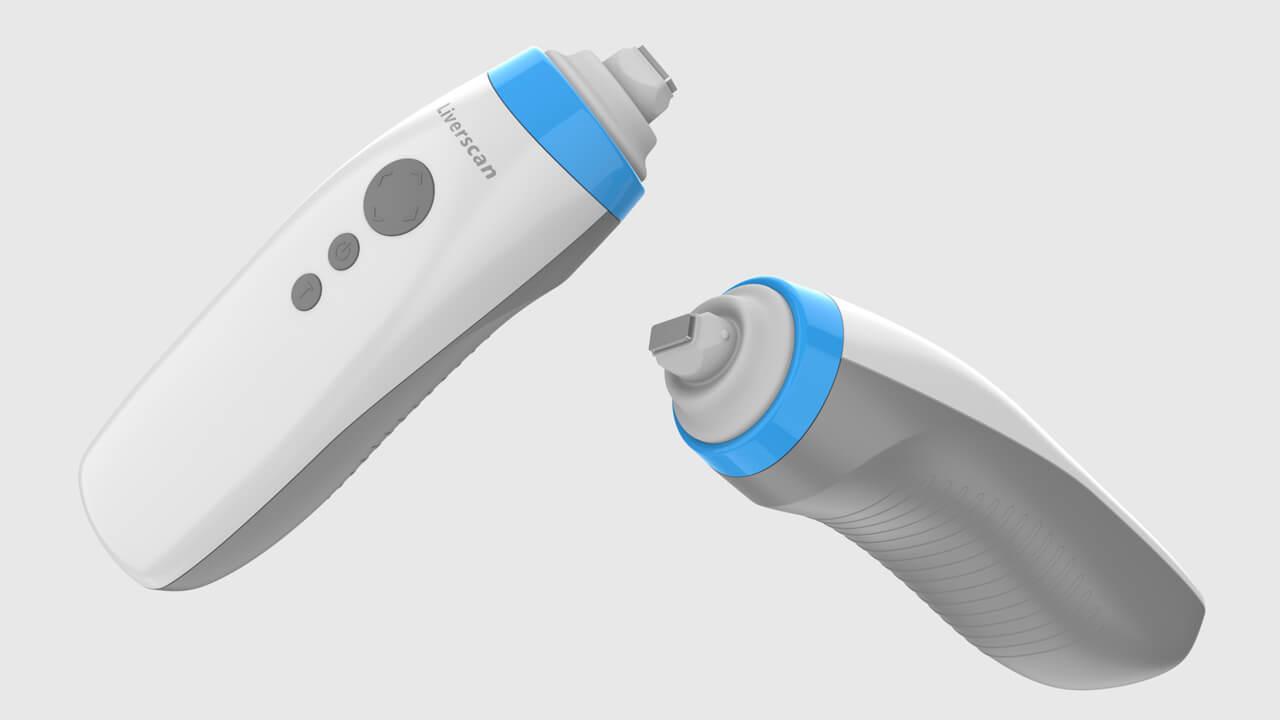
一款穩固與靈活兼備的夾爪,由柔性和線性氣動驅動器與剛性接頭結合而成
商品化機會
授權許可
解決方案
採用機器人操縱系統的主要限制是缺乏靈活的夾持裝置。現有機器人系統無法自動處理可變物體和非結構化任務。
創新技術
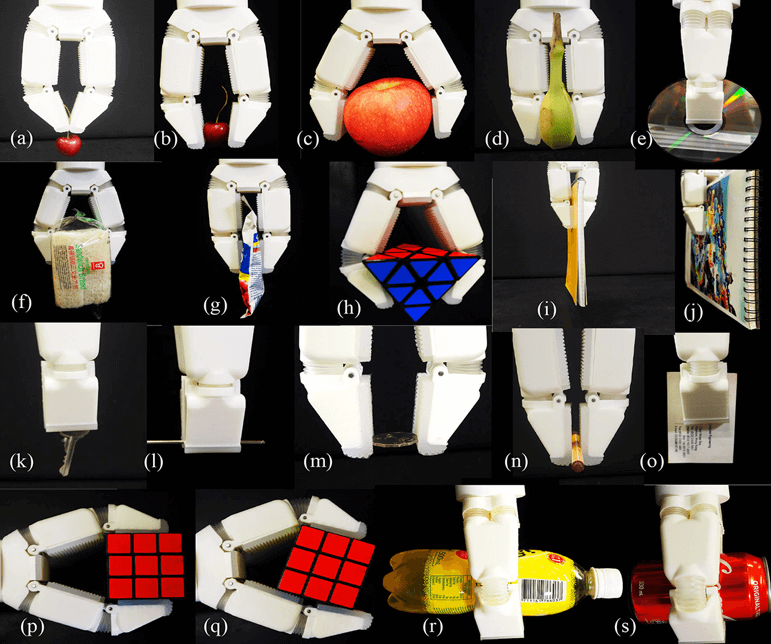
- 本發明介紹了一種獨特的方法,透過結合柔性和線性性驅動器與剛性接頭,實現穩固而靈活的抓取功能。
- 整個系統考慮到設計的承受能力,其中的模組化手指結構可根據工作要求,簡易地切換不同的末端執行裝置。
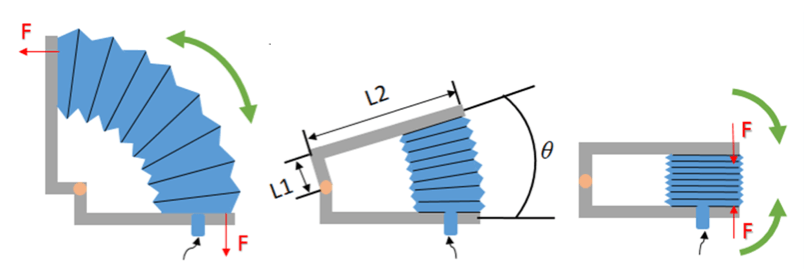
- 軟性驅動器靈活度高,具備柔性特質,而銷接位可令結構更加穩固。這「剛柔混合」的結構令機械爪抓夾時具適應性及穩固性。
主要成效
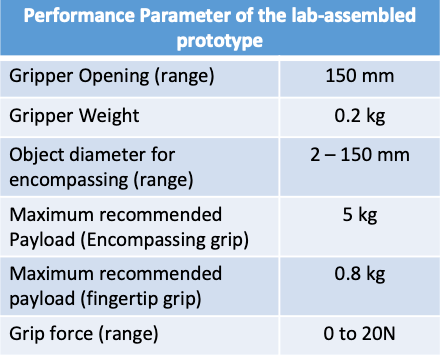
- 重量輕且有效載荷比率高(自身重量 25 倍的有效載重率)。
- 備有 4 種不同的抓夾模式,靈活性高
- 設計成本低,維護簡易
- 靈活的軟關節設計,混合結構有助提高穩定性和剛性,氣壓驅動裝置採用電子控制
應用範疇
- 處理精細物品的服務型機器人
- 協助病人康復的醫療機器人
- 與人類互動的穿戴式機器人
專利申請
- PCT 申請編號 PCT/CN2018/120518
- 美國申請編號 16/769,376
- 中國申請編號201880080833.X
香港大學
香港大學於一九一一年創校,是香港歷史最悠久的高等學府。港大創校至今逾一世紀,一直致力於創造知識、拓展教育、貢獻社會。今天的港大是一所以研究為主導的世界級綜合大學,校內設有十所學院,以自由、自主精神為學,力倡學術多元化。港大學術研究成就卓越,多年來深受本地、國內以至國際機構的認可,包括在競爭激烈的「優配研究金」、「卓越學科領域計劃」及「主題研究計劃」中佔最多獲批項目數量及最大份額的資助。港大與時並進,在研究和知識交流等方面不斷創新,培養優秀科研人才,同時匯聚各種領域的專家,涵蓋課題廣博,為不同行業帶來裨益。港大亦積極發展國際學術交流,與全球頂尖學府及科研機構攜手合作;當中一百三十九位教授根據其學術文章獲徵引次數獲評為全球最頂尖的百分之一科學家;獲中國科學院和工程院院士銜的學者在本地院校中爲數最多。
查詢